140.186 & 560.150 Seminar Master Work – Mechanical Engineering (3SH SE, WS & SS)
You are interested in working with modern robots or want to understand how such machines ‘learn’?
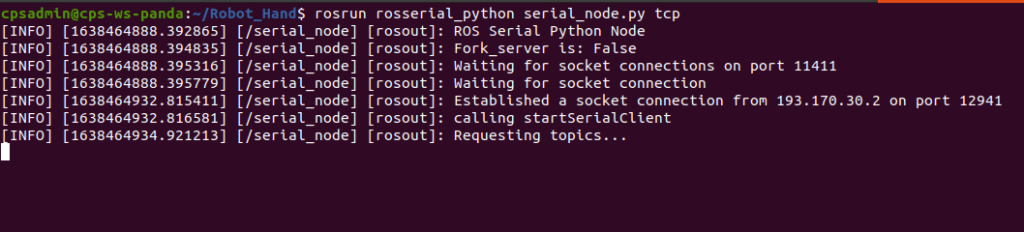
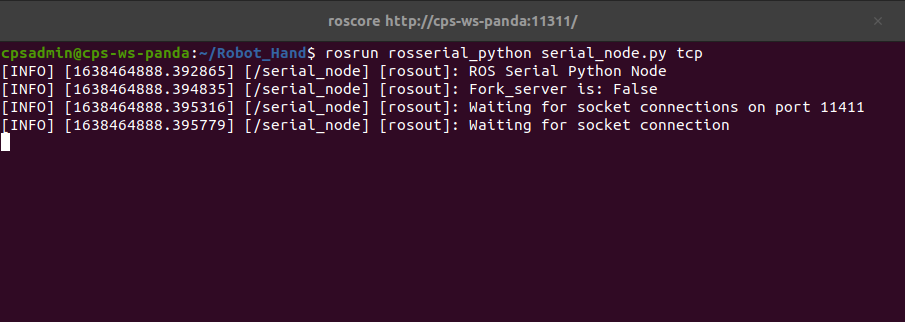
If so, this bachelor seminar will enable you to dig into the fascinating world of robot learning. You will implement and apply modern machine learning algorithms in Python, Matlab or C++/ROS.
Your learning or control algorithm will be evaluated in cyber-physical-systems. Find out which theses are currently supervised and offered.
Links and Resources
- Winter Semester: 140.186 MUOnline and 560.150 MUOnline .
- Sommer Semester: 140.186 MUOnline and 560.150 MUOnline .
- Latex Template for the thesis document.
- Instructions on how to write a thesis with us.
Location & Time
- Location: Laboratories at the Chair of Cyber-Physical-Systems.
- Dates: Regular, typ. weekly meetings, with your supervisor(s).
Learning objectives / qualifications
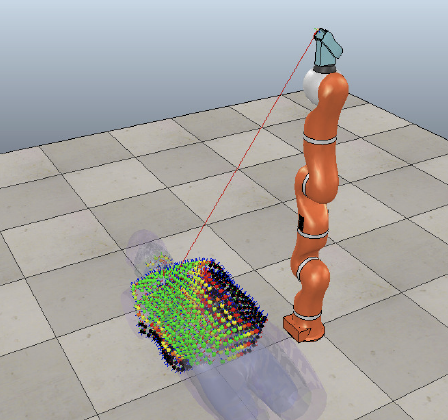
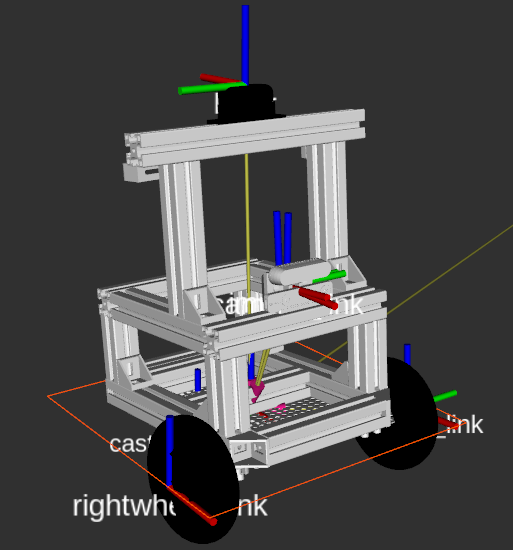
- Students will work on controlling, modeling and simulating Cyber-Physical-Systems and autonomously learning systems.
- Students understand and can apply advanced model learning and reinforcement techniques to real world problems.
- Students learn how to write scientific reports.
Literature
- The Probabilistic Machine Learning book by Univ.-Prof. Dr. Elmar Rueckert.
- Bishop 2006. Pattern Recognition and Machine Learning, Springer.
- Barber 2007. Bayesian Reasoning and Machine Learning, Cambridge University Press.
- Murray, Li and Sastry 1994. A mathematical introduction to robotic manipulation, CRC Press.
- B. Siciliano, L. Sciavicco 2009. Robotics: Modelling,Planning and Control, Springer.
- Kevin M. Lynch and Frank C. Park 2017. MODERN ROBOTICS, MECHANICS, PLANNING, AND CONTROL, Cambridge University Press.