Meta Quest 3
Meta Quest 3: Immersive Mixed Reality Headset

Meta Quest 3 is a cutting-edge mixed reality headset designed to blend immersive VR experiences with real-world awareness. Featuring a sleek, ergonomic design, it delivers high-resolution visuals and enhanced comfort, making it ideal for extended use across gaming, productivity, and creative applications.
The headset offers improved performance with advanced optics, a powerful Snapdragon XR2 Gen 2 chipset, and intuitive controls. Its wireless design ensures freedom of movement, while an adjustable fit provides a comfortable experience for all users.
Advanced Mixed Reality Capabilities
Meta Quest 3 integrates full-color passthrough and precise spatial mapping, enabling seamless transitions between virtual and physical environments. Its dynamic sensor suite tracks movement with precision, offering enhanced interaction and immersive AR overlays.
Paired with intuitive hand tracking, haptic controllers, and a robust content ecosystem, Meta Quest 3 redefines how users interact with digital and physical spaces, creating a versatile platform for both entertainment and productivity.
Videos
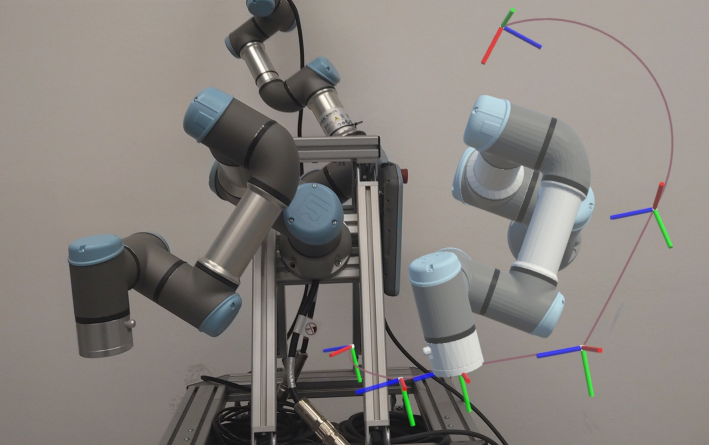
- Research videos using the robot will be presented here.