Fotios (Fotis) Lygerakis, M.Eng.
Hi! My name is Fotis and I am a doctoral student and university assistant at CPS since March 2022!
My goal is to advance machine learning and robotics, aiming to mimic human learning processes through abstraction, incremental conclusions, transfer learning, and creativity.
My research interests are centered on representation learning, visuotactile fusion and robot learning, with a focus on employing self-supervised learning methods, both contrastive and non-contrastive, as well as reinforcement learning techniques. Specifically, my work is dedicated to advancing the fields of representation learning and visuotactile robot learning, targeting manipulation tasks. This involves exploring innovative ways to enable robots to understand and interact with their environment through visual and tactile feedback, enhancing their ability to perform complex and tactile-rich manipulation tasks.
I am also contributing to human-robot interaction projects and develop interfaces for robotic manipulation.
Before starting my PhD at the University of Leoben, I held positions as a teaching assistant at the University of Texas at Arlington, a research assistant at Demokritos in Athens, and a research intern at Toshiba Research Europe in Cambridge. And before all that I received a Diploma in Electrical and Computer Engineering (equivalent to an Integrated Master in Engineering) from the Technical University of Crete (Greece) in 2019.
My work includes contributions to representation learning, reinforcement learning for robotic manipulation, healthcare robotics, and dialogue systems. I am also active in teaching, technical skill development, outreach, reviewing, and conference activities, committing to the scientific community to the best of my powers.

Research Interests
- Representation Learning: Methods for developing robust and informative representations of high-dimensional data, including self-supervised learning techniques such as contrastive learning and variational inference.
- Multimodal Fusion: Integrating visual and tactile sensory inputs to create comprehensive representations, enhancing robot learning and manipulation capabilities.
- Reinforcement Learning: Development of reinforcement learning algorithms that handle complex environments effectively, including algorithms that enhance the robot’s decision-making capabilities by balancing exploration and exploitation, and leveraging intrinsic motivation.
- Imitation Learning: Leveraging pre-existing and collecting new datasets for training can significantly reduce the need for extensive real-time training and ensure comprehensive learning. This direction addresses inherent problems in Behavior Cloning and Offline RL, such as the distribution shift and the lack of diverse scenarios.
- Practical Machine Learning Applications
- Robotics in Healthcare: Assistive Technologies, Dialogue Systems
- Industrial Automation: Inspection and Process Optimization
Theses and Internship Supervision
Thesis Topics
- Self-supervised Visual Representation Learning
- Reinforcement Learning algorithms and Robot Learning with Sim2Real transfer
- Augmented Reality Robot Interfaces
- Human Robot Interaction
Current & Past Theses
- [M.Sc. Thesis/Internship] ROS2-based Human-Robot Interaction Framework with Sign Language, Iye Szin Ang, August 2023
- [M.Sc. Thesis] Development of a Graphical User Interface and Deep Learning Methods for Automated Inspection in a Continuous Casting Steel Plant, Melanie Neubauer, March 2023
Students who wish to do their thesis under my supervision, shall choose their subject within the list of my research interests above. Feel free to contact me via email for further clarifications or directions.
Teaching
- 190.013 Introduction to Machine Learning Lab, Summer Semester 2023
- 190.015 Applied Machine and Deep Learning, Winter Semester 2023
- Proud founder of the Neural Coffee Reading Group.
Consultation
Companies, fellow colleagues or students who wish consultation on any of my research interests or background can contact me via email: fotios.lygerakis@unileoben.ac.at
Contact
M.Eng. Fotios Lygerakis
Doctoral Student supervised by Univ.-Prof. Dr. Elmar Rueckert
Montanuniversität Leoben
Franz-Josef-Straße 18,
8700 Leoben, Austria
Phone: +43 3842 402 – 1901 (Secretary of CPS)
Email: fotios.lygerakis@unileoben.ac.at
Chat: WEBEX
Publications
2024 |
|
M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. | 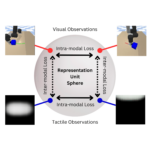 |
Multimodal Visual-Tactile Representation Learning through Self-Supervised Contrastive Pre-Training Proceedings Article In: IEEE International Conference on Robotics and Automation (ICRA), pp. 8013-8020, IEEE, 2024, ISBN: 979-8-3503-8457-4, (* equal contribution). | 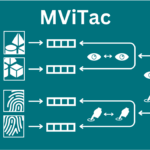 |
2023 |
|
CR-VAE: Contrastive Regularization on Variational Autoencoders for Preventing Posterior Collapse Proceedings Article In: Asian Conference of Artificial Intelligence Technology (ACAIT)., IEEE, 2023. |  |
2021 |
|
Accelerating Human-Agent Collaborative Reinforcement Learning Conference In Proceedings of the 14th PErvasive Technologies Related to Assistive Environments Conference (PETRA '21), Association for Computing Machinery, New York, NY, USA, 90–92, 2021. |  |
Sequential Late Fusion Technique for Multi-modal Sentiment Analysis Conference In Proceedings of the 14th PErvasive Technologies Related to Assistive Environments Conference (PETRA '21), Association for Computing Machinery, New York, NY, USA, 264–265. , 2021. | 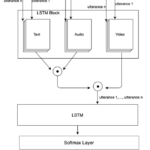 |
A Survey of Robots in Healthcare Journal Article In: Technologies, vol. 9, iss. 8, 2021. |  |
2020 |
|
In Proceedings of the 13th ACM International Conference on PErvasive Technologies Related to Assistive Environments (PETRA '20), Article 75, 1–6 Association for Computing Machinery, New York, NY, USA, 2020. |  |
Variational Denoising Autoencoders and Least-Squares Policy Iteration for Statistical Dialogue Manager Journal Article In: IEEE Signal Processing Letters , vol. 27, pp. 960-964, 2020. |  |
2019 |
|
Robust Belief State Space Representation for Statistical Dialogue Managers Using Deep Autoencoders Conference 2019 IEEE Automatic Speech Recognition and Understanding Workshop (ASRU), 2019. |  |