GitHub High-Accuracy Sensor Glove, ROS, Gazebo
Sensor gloves are gaining importance in tracking hand and finger movements in virtual reality applications as well as in scientific research. In this project, we developed a low-budget, yet accurate sensor glove system that uses flex sensors for fast and efficient motion tracking.
The contributions are ROS Interfaces, simulation models as well as motion modeling approaches.
GitHub Code & Links
- https://github.com/ai-lab-science/SensorGloves
- The software development is part of the TRAIN project.
- The development is based on prior sensor glove designs.
Details to the Software Development
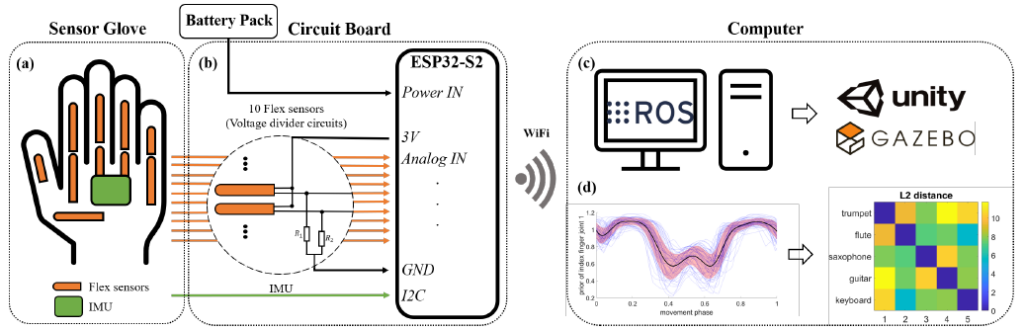
The figure shows a simplified schematic diagram of the system architecture for our sensor glove design:
(a) Glove layout with sensor placements, the orange fields denote the flex sensors, while the IMU is marked as a green rectangle,
(b) Circuit board which is wired with the sensor glove, has 10 voltage dividers for reading each flex sensor connected to ADC pins of the microcontoller ESP32-S2 and the IMU is connected to I2C pins,
(c) The ESP32-S2 sends the raw data via WiFi as ROS messages to the computer, which allows a real-time visualization in Unity or Gazebo,
(d) Post-processing of the recorded data, e.g. learning probabilistic movement models and searching for similarities.
Publications
A research publication by Robin Denz, Rabia Demirci, M. Ege Cansev, Adna Bliek, Philipp Beckerle, Elmar Rueckert and Nils Rottmann is currently under review.