Svenja Stark, M.Sc.
Ph.D. Student at the Technical University of Darmstadt

Short bio: Svenja Stark left the TU Darmstadt team in 2020 and is now a successful high school teacher in Hessen. She joined the Intelligent Autonomous Systems Group as a PhD student in December 2016, where she was supervised by Prof. Dr. Jan Peters and Univ.-Prof. Dr. Elmar Rueckert.
She has been working on the GOAL-Robots project that aimed at developing goal-based open-ended autonomous learning robots; building lifelong learning robots.
Before joining the Autonomous Systems Labs, Svenja Stark received a Bachelor and a Master of Science degree in Computer Science from the TU Darmstadt. During her studies, she completed parts of her graduate coursework at the University of Massachusetts in Amherst. Her thesis entitled “Learning Probabilistic Feedforward and Feedback Policies for Generating Stable Walking Behaviors” was written under supervision of Elmar Rueckert and Jan Peters.
Research Interests
- Multi-task learning, meta-learning, goal-based learning, intrinsic motivation, lifelong learning, Reinforcement Learning, motor skill learning.
Contact & Quick Links
M.Sc. Svenja Stark
Doctoral Student supervised by Prof. Dr. Jan Peters and Univ.-Prof. Dr. Elmar Rueckert.
Hochschulstr. 10,
64289 Darmstadt,
Deutschland
Email: svenja@robot-learning.de
Web: https://www.rob.uni-luebeck.de/index.php?id=460
Publcations
2019 |
|
Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. | 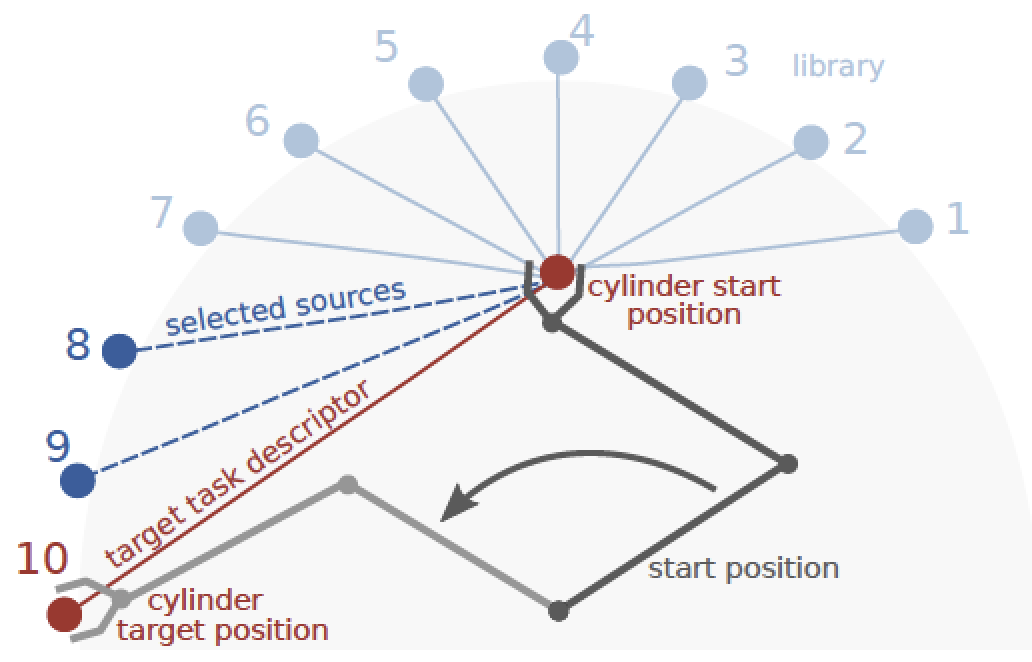 |
2017 |
|
A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. | 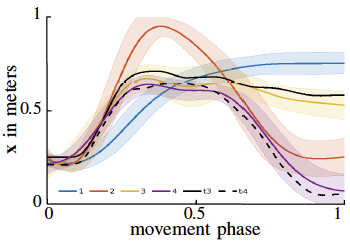 |
Simulation of the underactuated Sake Robotics Gripper in V-REP Conference Workshop at the International Conference on Humanoid Robots (HUMANOIDS), 2017. | 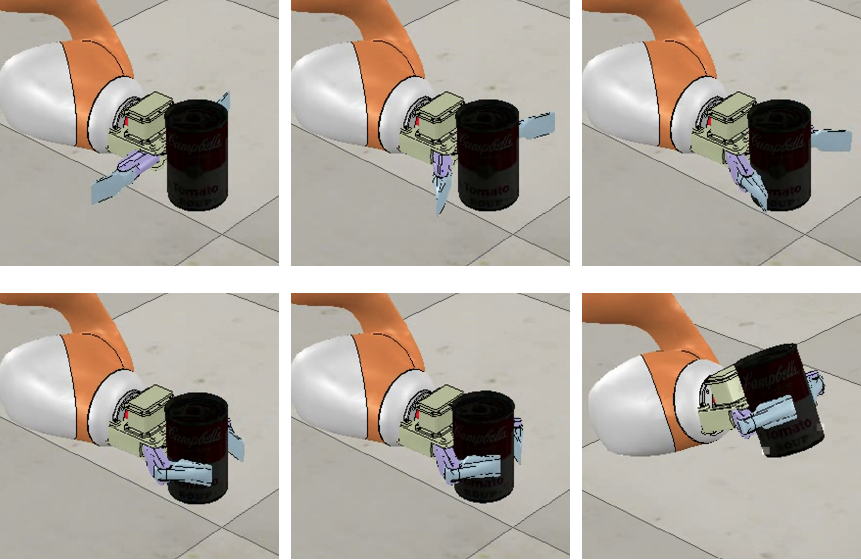 |