Open Source Mobile Robot
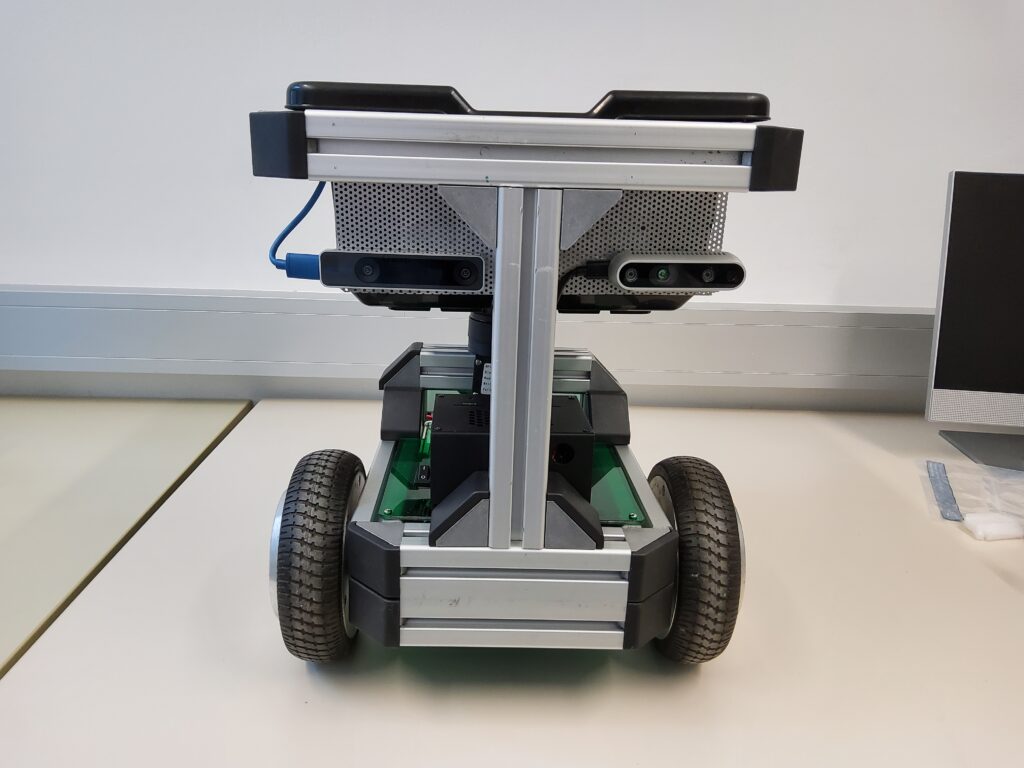
CPS presents a guide to build an open-source modular mobile platform for research, navigation and logistics applications. Its design leveraged off-the-shelf (OTS) components, additive manufacturing technologies, aluminium profiles, and consumable hover-board high-torque brushless direct current (BLDC) motors. It is compatible with the robot operating system (ROS) with a maximum payload of 90kg.
It provides a simple yet robust framework for contextualising simultaneous localisation and mapping (SLAM) algorithms, which are the fundamental prerequisites for autonomous navigating robots. It features several control approaches such as remote control from RC devices, Android-based devices, hand gestures, ROS rqt etc.
Components
Sensors:
-
RPLIDAR A2 M8
-
RealSense Depth Camera D435i
-
Intel Realsense Tracking Camera T265
-
Turnigy 9X 2,4 GHz 8CH Receiver (V2)
Power Supply:
-
VARTA Slim Power Bank – 18000 mAh
-
36V Lithium-ion battery 4400mAh
Electronics:
-
2 x 6,5“ hoverboard brushless DC (BLDC) motors with 15 pole pairs
-
Nvidia Jetson Nano B01 64GB
-
Arduino Mega 2650 Rev3
-
ODRIVE 56V V3.6
Videos
Publications
More information can be found in the publication: https://doi.org/10.1016/j.ohx.2023.e00426
Links
- Related Bachelor Thesis: Gesture Based Mobile Robot Teleoperation for Navigation Application
- All the design, construction and software files are freely available online under the GNU GPL v3 license at https://doi.org/10.17605/OSF.IO/K83X7