Publications
Publication List with Images
2021 |
|
Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems Proceedings Article In: European Conference on Mobile Robots (ECMR 2021), 2021. | 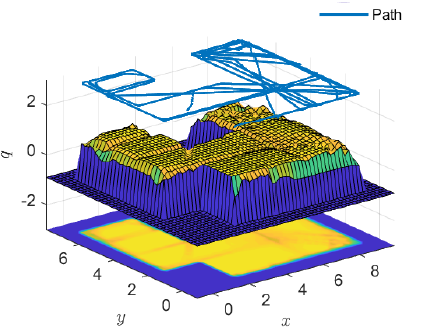 |
SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). | 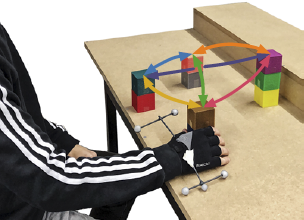 |
Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. | 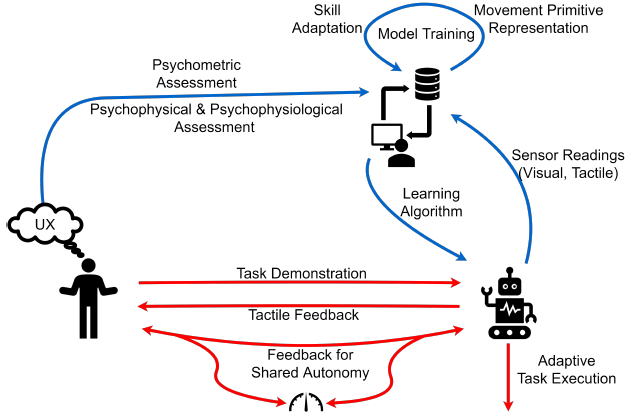 |
2019 |
|
Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks Journal Article In: Neural Networks - Elsevier, vol. 109, pp. 67-80, 2019, ISBN: 0893-6080, (Impact Factor of 7.197 (2017)). | 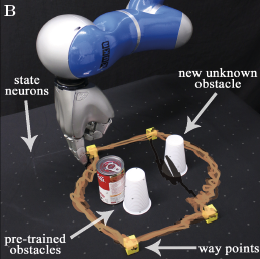 |
2018 |
|
Inverse Reinforcement Learning via Nonparametric Spatio-Temporal Subgoal Modeling Journal Article In: Journal of Machine Learning Research (JMLR), vol. 19, no. 69, pp. 1-45, 2018. | 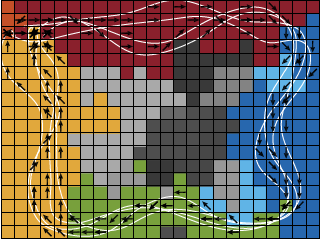 |
2015 |
|
Extracting Low-Dimensional Control Variables for Movement Primitives Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. | 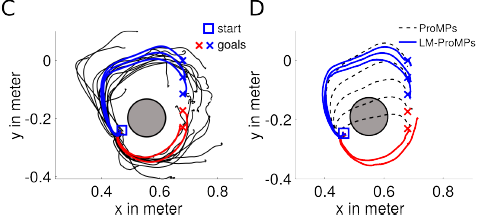 |
2014 |
|
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. | 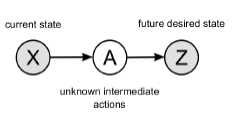 |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. | 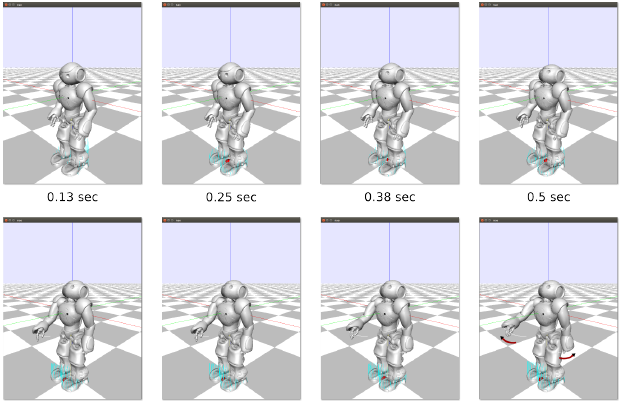 |
2013 |
|
Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. | 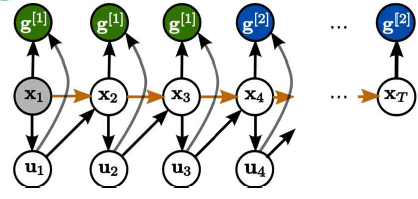 |
2012 |
|
Stochastic Optimal Control Methods for Investigating the Power of Morphological Computation Journal Article In: Artificial Life, vol. 19, no. 1, 2012. | 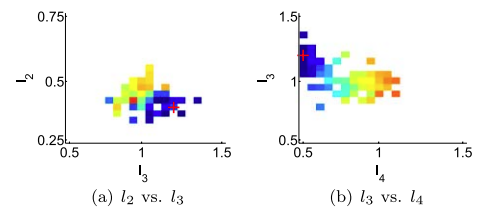 |
2011 |
|
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. | 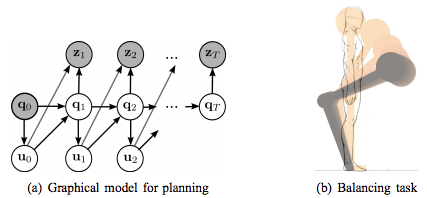 |
2010 |
|
Simultaneous localisation and mapping for mobile robots with recent sensor technologies Masters Thesis Technical University Graz, 2010. | 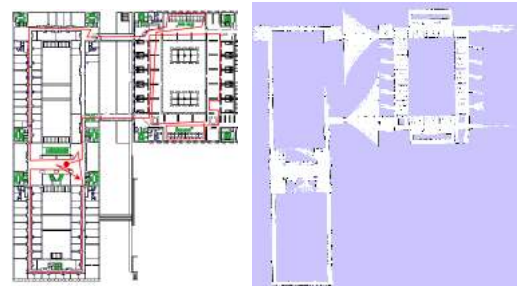 |
Compact List without Images
Journal Articles |
SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). |
Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. |
Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks Journal Article In: Neural Networks - Elsevier, vol. 109, pp. 67-80, 2019, ISBN: 0893-6080, (Impact Factor of 7.197 (2017)). |
Inverse Reinforcement Learning via Nonparametric Spatio-Temporal Subgoal Modeling Journal Article In: Journal of Machine Learning Research (JMLR), vol. 19, no. 69, pp. 1-45, 2018. |
Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. |
Stochastic Optimal Control Methods for Investigating the Power of Morphological Computation Journal Article In: Artificial Life, vol. 19, no. 1, 2012. |
Proceedings Articles |
Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems Proceedings Article In: European Conference on Mobile Robots (ECMR 2021), 2021. |
Extracting Low-Dimensional Control Variables for Movement Primitives Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. |
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. |
Masters Theses |
Simultaneous localisation and mapping for mobile robots with recent sensor technologies Masters Thesis Technical University Graz, 2010. |
PhD Theses |
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. |