

Publication List with Images
2016 |
|
Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities Proceedings Article In: Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON), 2016. | 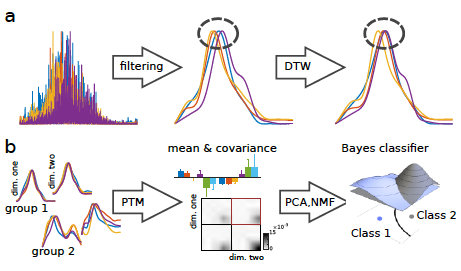 |
A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction Proceedings Article In: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. | 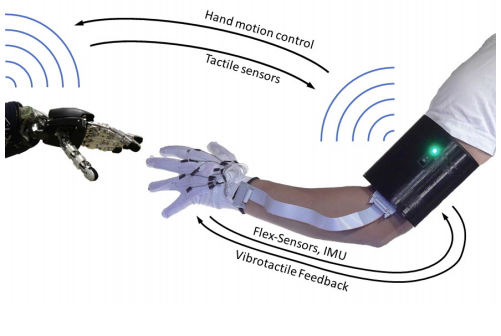 |
2015 |
|
Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations Proceedings Article In: ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots, 2015. | 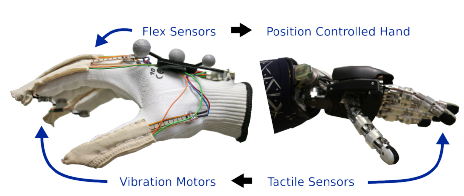 |
2014 |
|
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. | 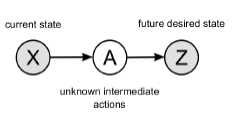 |
2013 |
|
Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. | 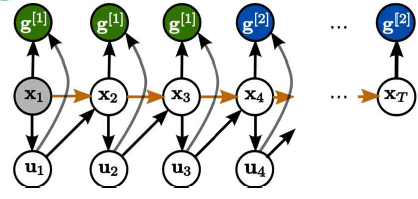 |
2011 |
|
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. | 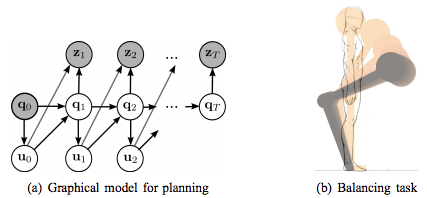 |
Compact List without Images
Journal Articles |
Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. |
Proceedings Articles |
Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities Proceedings Article In: Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON), 2016. |
A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction Proceedings Article In: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. |
Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations Proceedings Article In: ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots, 2015. |
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. |
PhD Theses |
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. |