Infineon Technologies Austria AG
![]()
Forschungsprojekt zum Einsatz humanoider Roboter in der Industrie
Das Projekt hat im Jahr 2025 gestartet und befasst sich mit dem Einsatz von humanoiden Robotern in komplexen industriellen Umgebungen.
![]()
Das Projekt hat im Jahr 2025 gestartet und befasst sich mit dem Einsatz von humanoiden Robotern in komplexen industriellen Umgebungen.
BaKIRoS hat zum Ziel, die Wertschöpfungskette für Batterien zu schließen, indem End-of-Life-(EoL)-Batterien zuverlässig aus gemischten Abfallströmen ausgeschleust werden. Durch den Einsatz von sensor- und KI-gestützten Verfahren können sowohl beschädigte als auch intakte Batterien identifiziert und separiert werden.
Die gezielte Aussortierung ermöglicht die Rückgewinnung kritischer Rohstoffe wie Kobalt, Nickel, Lithium und Graphit und trägt damit sowohl zur Ressourcenschonung als auch zur Reduktion von Umweltbelastungen bei.
Im Rahmen des 24-monatigen Forschungsprojekts werden innovative Ansätze zur KI- und sensorgestützten Batteriedetektion entwickelt, trainiert und systematisch evaluiert. Dabei liegt ein besonderer Fokus auf der Untersuchung und dem Vergleich unterschiedlicher Trainingsdatensätze und Modellansätze für den Einsatz in realen Recyclingprozessen.
Lehrstuhl für Abfallverwertungstechnik und Abfallwirtschaft (AVAW)
Steirische Wirtschaftsförderungsgesellschaft m.b.H. SFG
urope’s high-temperature industries, such as steel, cement, and glass, rely on refractory materials that are critical for safe, efficient, and sustainable operations. As the EU is currently under strong Green and Digital Transitions, the refractory sector faces urgent challenges: decarbonisation, circularity, and digitalisation. In this specific industrial sector, current practices are still limited by empirical design, fragmented data, and low recycling rates, while new regulations demand traceability and reduced carbon footprint.
REFFRACTEUR (Digital REFractory FRAmework for a Carbon-neutral and Resilient indusTry in EURope) addresses these challenges by gathering a unique consortium spanning the entire refractory value chain, from raw materials to end-users, across academia and industry. The project will train 15 Doctoral Candidates through an innovative programme combining advanced research in materials science, process engineering, digital tools (AI, digital twins, and sustainability (life cycle assessment). Each researcher will benefit from dual academic/industrial supervision and spend at least 50% of their time in industry, ensuring strong intersectoral skills and real-world impact.
REFFRACTEUR will deliver: (1) new sustainable refractory materials with improved durability and recyclability; (2) the first unified circularity framework for refractories, integrating digital product passports and life cycle assessment; (3) validated digital twins and AI-based decision-support systems for predictive maintenance and energy optimisation; and (4) an open, standardised data backbone to accelerate innovation and knowledge transfer.
By embedding training, research, and innovation in a single European network, REFFRACTEUR will strengthen Europe’s industrial sovereignty, reduce dependency on critical raw materials, and position the EU as a global leader in sustainable, digitalised refractory technologies. The project’s outcomes will directly support the EU’s climate, circular economy, and skills agendas, creating lasting impact for industry, society, and future generations of researchers.
The partners include 17 beneficiaries and 10 associated partners, see https://www.reffracteur.eu/partners/.
The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible.
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• Duration:
• PhD: up to 4 years (including completion of the doctoral degree)
• Postdoc: initially 2 years, with the option for extension
Research Focus
The positions are part of projects aiming to unlock the potential of humanoid robots in industrial environments. Our research focuses on learning-based methods for robust, adaptive, and generalizable robot skills, including:
• Whole-body control of humanoid robots in teleoperation and learning-based environments
• Robot skill learning using modern generative and reinforcement learning approaches
• Multi-modal robot learning utilizing vision, acoustic, and tactile sensing
• Simulation-based learning and sim-to-real transfer for robust deployment
• Adaptive manipulation and motion planning in dynamic and unstructured environments
This research position will focus on multiple aspects of these topics, with a special emphasis on humanoid robot skill learning of industrial applications.
What we offer
• A dynamic and collaborative research environment in artificial intelligence and robotics
• The opportunity to develop your own research ideas and work on cutting-edge projects
• Access to state-of-the-art lab facilities
• International research collaborations and conference travel opportunities
• Targeted career guidance for a successful academic and research career
The figure below illustrates an example application of the project, focusing on learning manipulation tasks with objects on a conveyor belt. The picture above is an artwork created out of that picture from our research lab.

Requirements
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• For postdoctoral candidates: A completed Ph.D. in a topic related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in writing a PhD dissertation
Desired additional qualifications
• Programming experience in C, C++, C#, Java, MATLAB, Python, or a similar language
• Familiarity with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel for research collaborations and technical presentations
Application & Materials
A complete application includes:
1. Curriculum Vitae (CV) (detailed)
2. Letter of Motivation – State if you apply for the Ph.D. or the postdoc position
3. Master’s or Ph.D. Thesis (PDF or link)
4. Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
5. Letter(s) of Recommendation
6. Contact Information for References (name, email, phone)
7. Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.Research Focus
![]()
Short bio: Mr. Aditya Sehgal started at CPS on 16th of April in 2026.
M.Sc. Aditya Sehgal
Doctoral Student supervised by Univ.-Prof. Dr. Elmar Rueckert.
Montanuniversität Leoben
Roseggerstrasse 11 ,
8700 Leoben, Austria
Phone: +43 3842 402 – 1901 (Sekretariat CPS)
Email: aditya.sehgal@unileoben.ac.at
Web Work: CPS-Page
Chat: WEBEX
Personal Website
GitHub
Google Citations
LinkedIn
Research Gate
The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible in collaboration with Siemens within the EU-funded MSCA Doctoral Network project REFFRACTEUR.
• Duration:
• PhD: 3 years (structured as 18 months at Siemens and 18 months at Montanuniversitaet Leoben)
more details on the recruitment procedure and benefits can be found here: https://www.reffracteur.eu/reffracteur-phd-recruitment-procedures/
The REFFRACTEUR (Digital REFractory FRAmework for a Carbon-neutral and Resilient indusTry in EURope) project brings together a unique consortium across academia and industry to advance sustainable refractory materials. It trains doctoral candidates through interdisciplinary research combining materials science, digital technologies (AI and digital twins), and sustainability, with strong industrial integration.
This specific position corresponds to:
PhD 03 – Semantic data integration and cloud-based industrial platforms for circular refractory life cycle applications
The research focuses on developing digital and AI-driven solutions for circular economy applications in industrial environments, including:
• Semantic data integration across heterogeneous industrial data sources
• Development of cloud-based industrial platforms for lifecycle data management
• Integration of sustainability indicators into digital decision-support systems
• Data-driven support for material selection, design, and end-of-life strategies
• AI-based methods for analyzing industrial processes and lifecycle data
This position combines cutting-edge research in AI, data engineering, and industrial digitalization with real-world applications in collaboration with Siemens, including a strong focus on circular economy and sustainability in industry.
• A dynamic and collaborative research environment in artificial intelligence and industrial digitalization
• Joint supervision between academia and industry (Montanuniversitaet Leoben & Siemens)
• A structured international doctoral training program within an EU MSCA network
• The opportunity to work on real-world industrial challenges with high impact
• Access to state-of-the-art research infrastructure and industrial platforms
• International research collaborations and conference travel opportunities
• Targeted career guidance for academic and non-academic career paths
• Master’s degree in Computer Science, Physics, Mechanics, Robotics, or a related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in pursuing a PhD in an international and industrial context
• Strong programming skills
• Background or interest in Artificial Intelligence and data-driven methods
• Familiarity with cloud platforms, data engineering, or industrial IT systems
• Experience with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel and spend extended research periods at Siemens and other project partners
A complete application includes:
Curriculum Vitae (CV) (detailed)
Letter of Motivation – clearly stating your interest in this specific PhD position
Master’s Thesis (PDF or link)
Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
Letter(s) of Recommendation
Contact Information for References (name, email, phone)
Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.
The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible.
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• Duration:
• PhD: up to 4 years (including completion of the doctoral degree)
• Postdoc: initially 2 years, with the option for extension
About the Position
The RoboWork project aims to unlock the full potential of humanoid robots in industrial environments, paving the way for their effective and reliable deployment in future workplaces.
We are at the forefront of developing cutting-edge machine learning algorithms for robot skill learning for industrial applications, including:
• Whole-body control of humanoid robots in teleoperation and learning-based environments
• Robot skill learning using modern generative and reinforcement learning approaches
• Multi-modal robot control utilizing vision, acoustic, and tactile sensing
• Simulation-based learning and sim-to-real transfer for robust deployment
• Adaptive manipulation and motion planning in dynamic and unstructured environments
This research position will focus on multiple aspects of these topics, with a special emphasis on humanoid robot skill learning of industrial applications.
What we offer
• A dynamic and collaborative research environment in artificial intelligence and robotics
• The opportunity to develop your own research ideas and work on cutting-edge projects
• Access to state-of-the-art lab facilities
• International research collaborations and conference travel opportunities
• Targeted career guidance for a successful academic and research career
The figure below illustrates an example application of the project, focusing on learning manipulation tasks with objects on a conveyor belt.
Requirements
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• For postdoctoral candidates: A completed Ph.D. in a topic related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in writing a PhD dissertation
Desired additional qualifications
• Programming experience in C, C++, C#, Java, MATLAB, Python, or a similar language
• Familiarity with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel for research collaborations and technical presentations
Application & Materials
A complete application includes:
1. Curriculum Vitae (CV) (detailed)
2. Letter of Motivation – State if you apply for the Ph.D. or the postdoc position
3. Master’s or Ph.D. Thesis (PDF or link)
4. Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
5. Letter(s) of Recommendation
6. Contact Information for References (name, email, phone)
7. Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.
Ziel des Projekts MineView ist die Entwicklung eines digitalen Überwachungssystems, das letztendlich eine ganzheitliche und kontinuierliche gebirgsmechanische Zustandsbewertung von untertägigen Bauwerken ermöglicht. Durch den Einsatz von Robotern, Sensorik und KI werden bestehende Überwachungsmethoden revolutioniert und eine neue Ära der digitalen Bergwerksüberwachung eingeleitet.
Der Lehrstuhl wird im Zuge dieses Projektes den Einsatz von autonomen Robotern und/ oder Drohnen für die Zustandserfassung und Integration in bestehende Produktionsabläufe erforschen.
Bild, akustische und andere Daten werden systematisch erfasst und mit maschinellen Lernmethoden ausgewertet. Ziel ist die automatische Erkennung von Mustern in gebirgsmechanischen Daten sowie in Umweltdaten. Die Vorhersagen der entwickelten Lernmethoden sollen in Frühwarnsystemen kritische Zustände frühzeitig identifizieren und so zur Sicherheit im Untertagebau beitragen.
Österreichische Forschungsförderungsgesellschaft mbH (FFG)
|
Die primären Ziele des industriellen Forschungsprojekts RoboWork adressieren die Bereitstellung und Evaluierung humanoider robotischer Technologien in produktiven industriellen Anwendungen. Dazu werden zwei Hauptziele verfolgt:
|
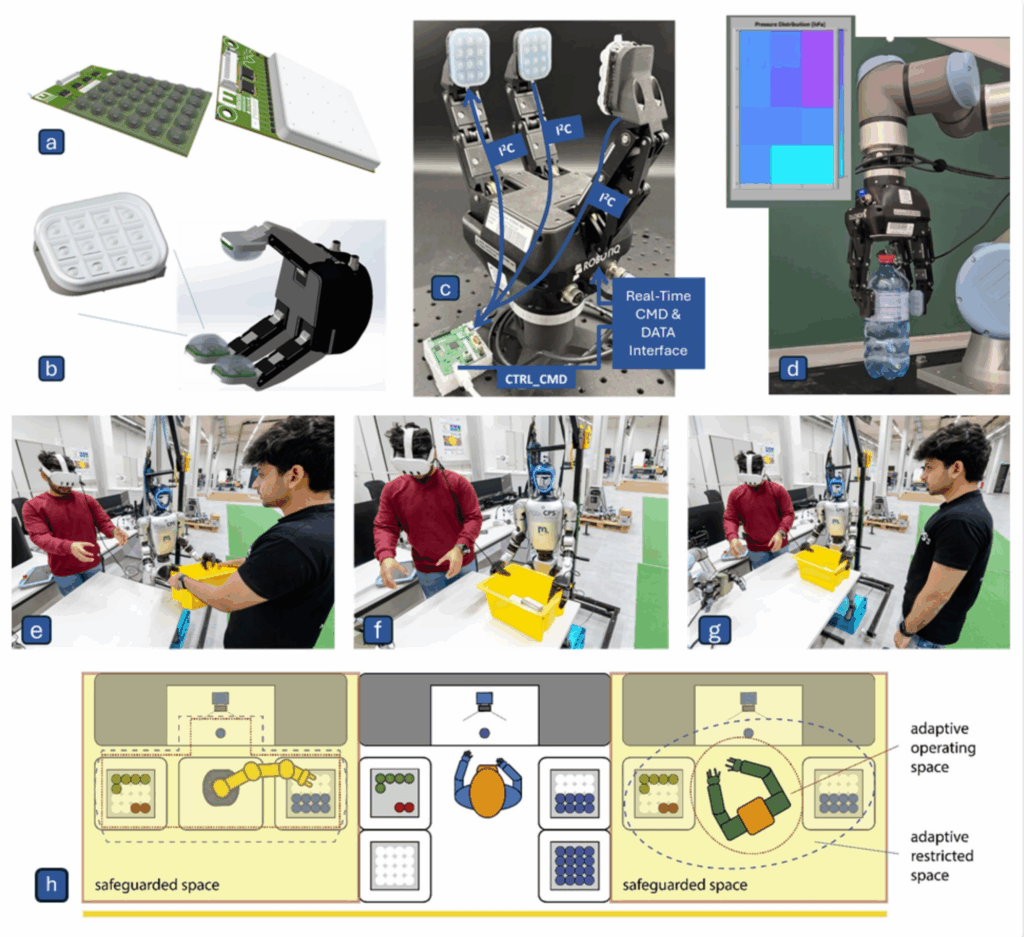
Abbildung: Schematische Darstellung existierender Technologien (a bis g), die im industriellen Umfeld engesetzt werden (h).
Österreichische Forschungsförderungsgesellschaft mbH (FFG)

Short bio: Cynthia Ani joined CPS in March 2026.
She is studying data science in her final year of her masters program at the TU Graz and industrial data science in Leoben. Her research interests includes AI and in particular modern machine learning methods.
Cynthia Ani
Student Assistant at the Chair of Cyber-Physical-Systems
Montanuniversität Leoben
Franz-Josef-Straße 18,
8700 Leoben, Austria