













News

We are pleased to announce that our EU-funded Doctoral Network project has been successfully approved. The project offers an exciting opportunity for doctoral candidates to gain both academic and industrial…Read More
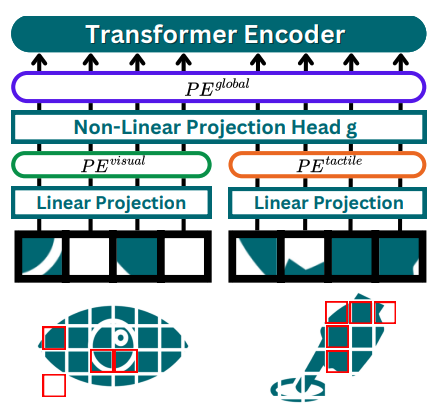
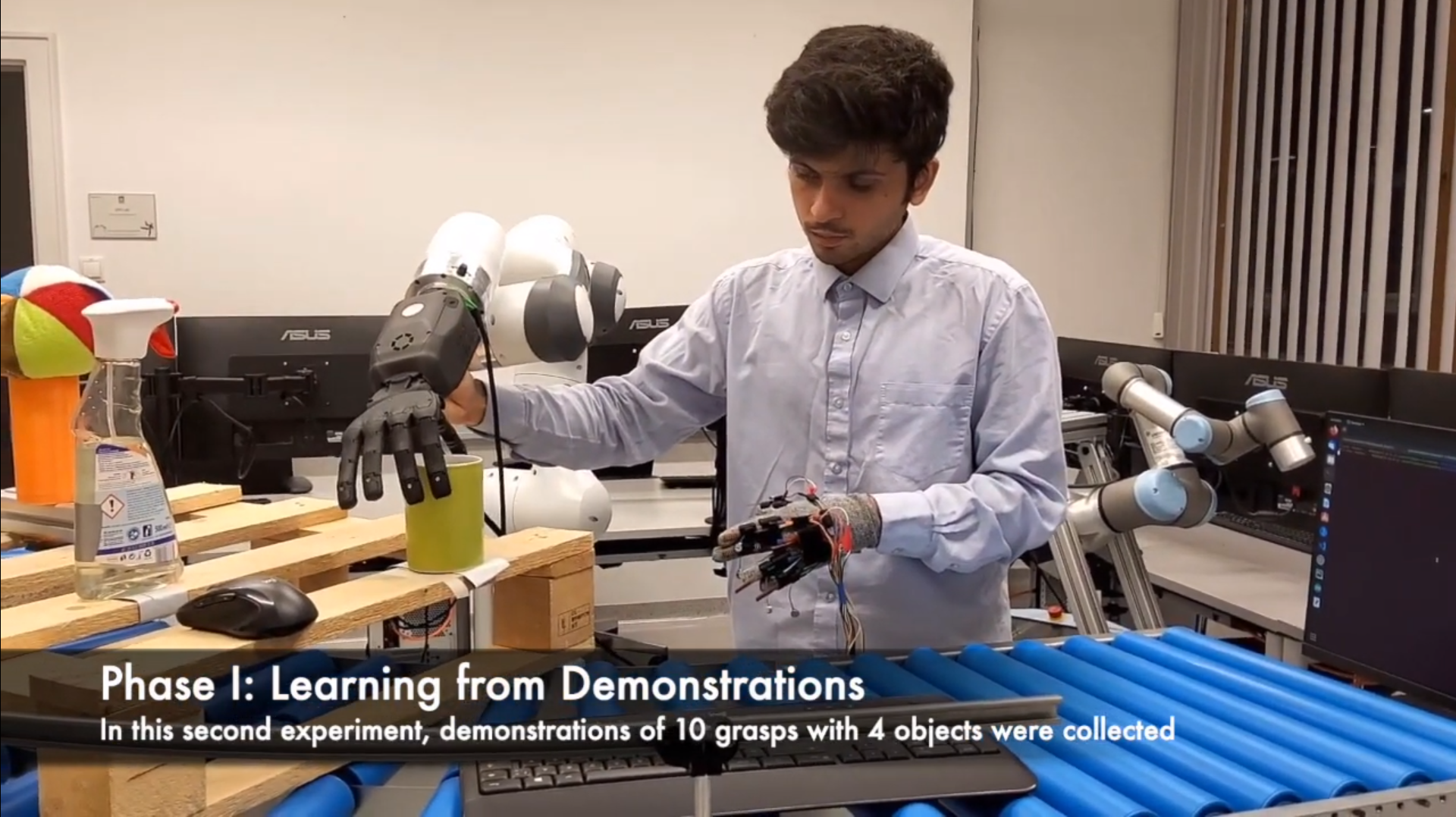
The paper by Fotios Lygerakis, Ozan Özdenizci, and Elmar Rueckert titled ‘ViTaPEs: Visuotactile Position Encodings for Cross-Modal Alignment in Multimodal Transformers’ has been accepted for publication at TMLR (Transactions on Machine…Read More
Our proposal RoboWork—an industrial research initiative focused on advancing humanoid robotics for real-world applications—has been accepted for funding! Over the coming years, the project will drive knowledge creation, development, and…Read More
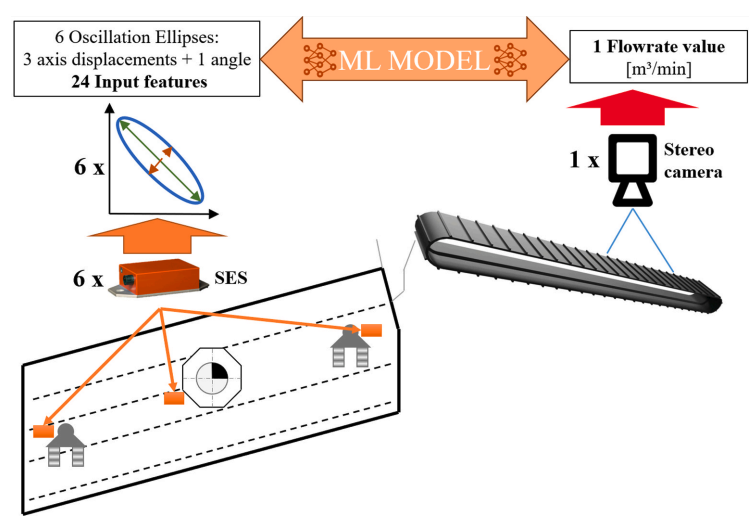
We are pleased to announce that our latest paper, ‘Prediction of feed flowrates, based on vibration patterns, generated by vibration sensors on an industrial circular vibrating screen using a set…Read More
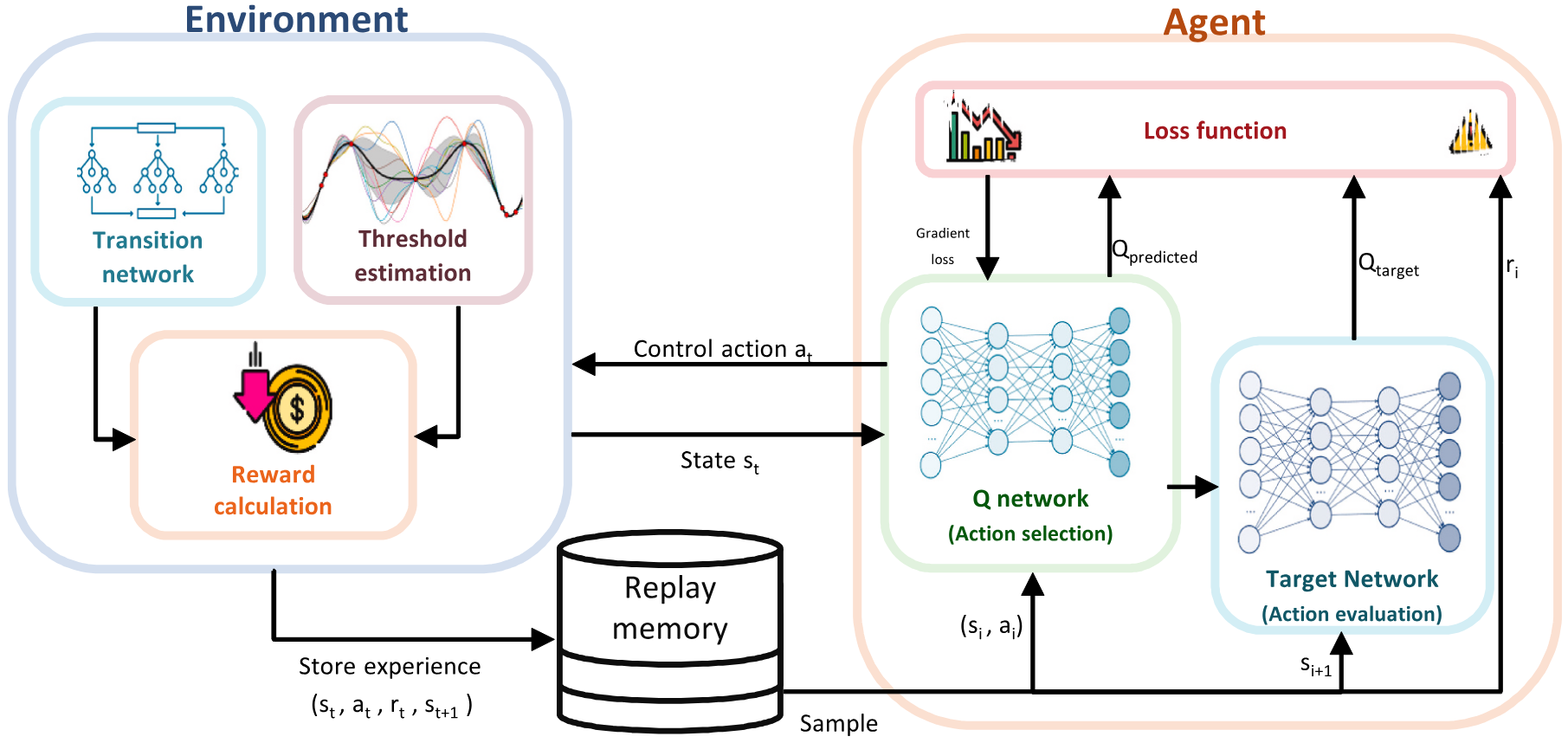
We are pleased to announce that our latest paper, “Deep reinforcement learning for automated decision-making in wellbore construction”, by Sahar Keshavarz , Asad Elmgerbi , Vedant Dave, Elmar Rückert, and Gerhard…Read More
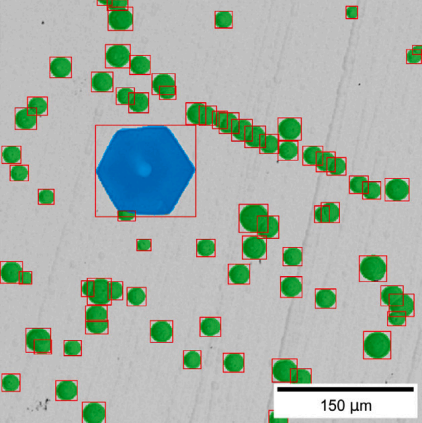
We are pleased to announce that our latest paper, “Instance segmentation pipeline for etch pit detection and prismatic slip characterization on silicon carbide substrates”, by Georg Holub, Sebastian Hofer, Thomas…Read More

Our paper by Vedant Dave, Ozan Özdenizci and Elmar Rueckert on “Learning Robust Representations for Visual Reinforcement Learning via Task-Relevant Mask Sampling” was accepted for publication at the Transactions on…Read More
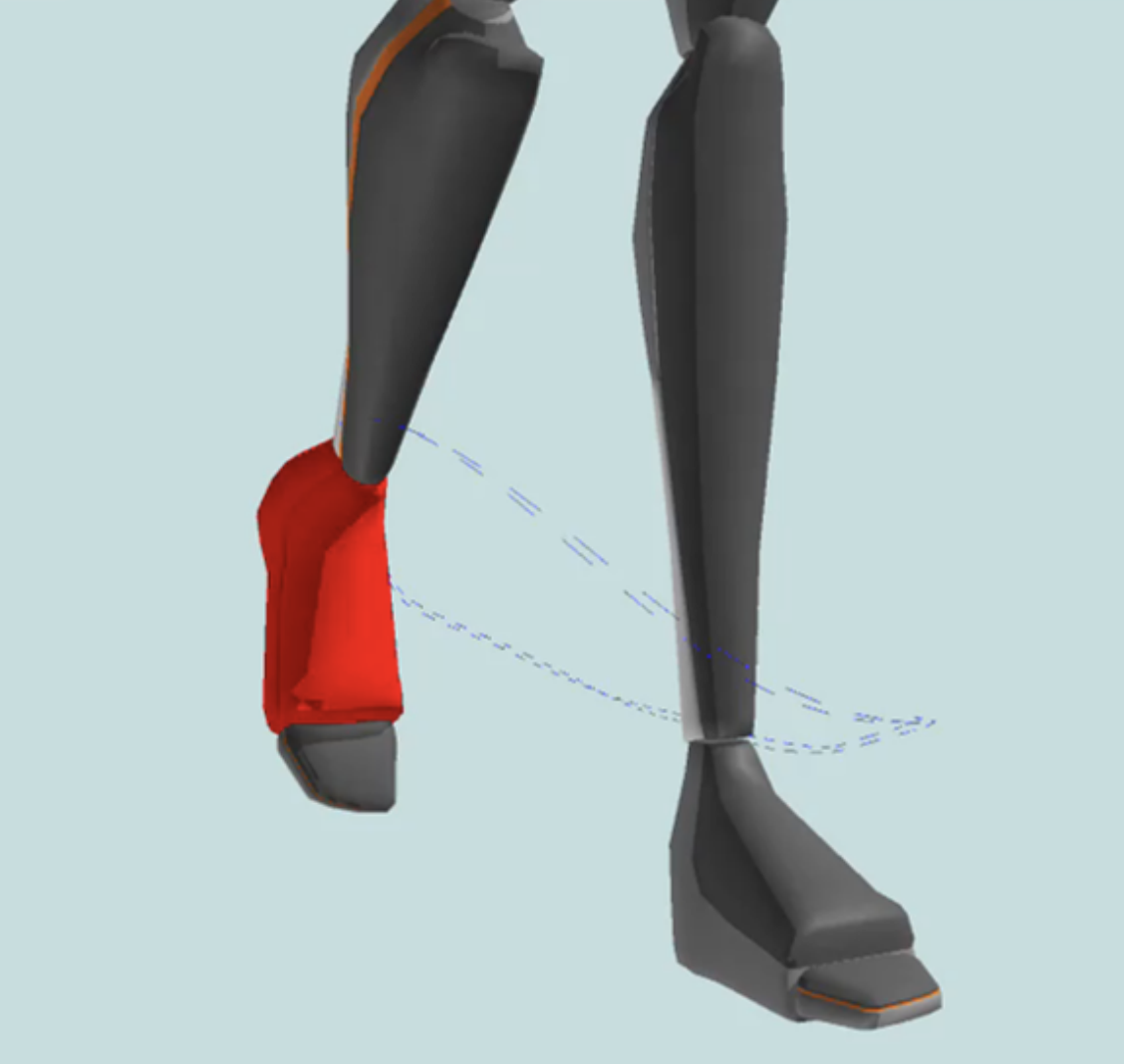
Our paper by Marko Jamsek, Elmar Rueckert and Jan Babic on ‘Foot Placement Prediction in Real-Time Using Probabilistic Movement Primitives’ was accepted at the IEEE-RAS International Conference on Humanoid Robots…Read More
Our proposal MINEView—an initiative focused on autonomous systems for assessing underground mining conditions and delivering early warnings—has been accepted for funding! Over the next three years, the CPS team will…Read More
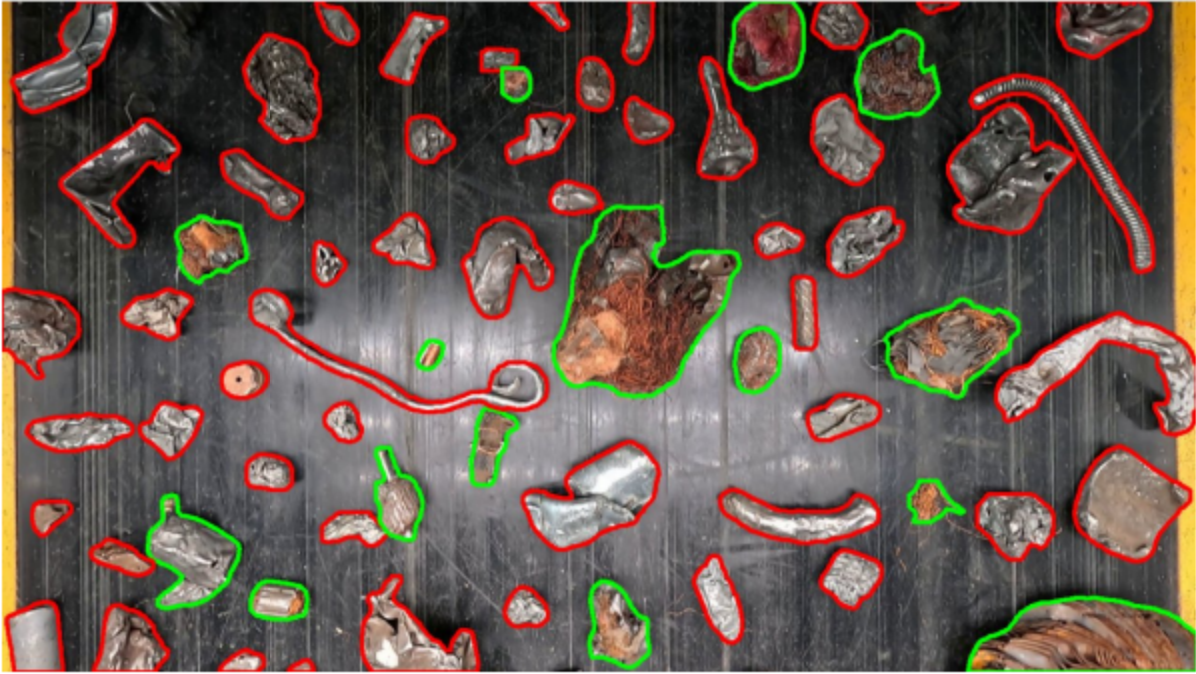
The paper by Melanie Neubauer and Ozan Özdenizci and Justus Piater and Elmar Rueckert on Sparsifying instance segmentation models for efficient vision-based industrial recycling was selected for publication at the…Read More

Our joint grant proposal with Prof. Thomas Thurner was selected for funding by our university rectorate. We will set up an Innovation lab for automation, robotics, and AI with a…Read More
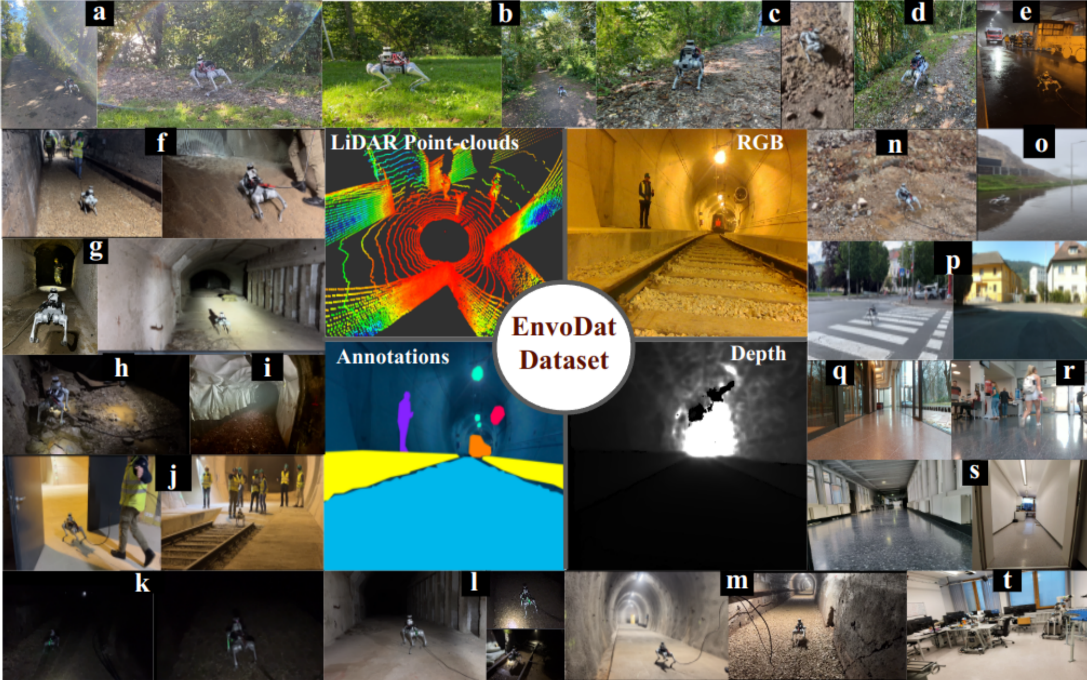
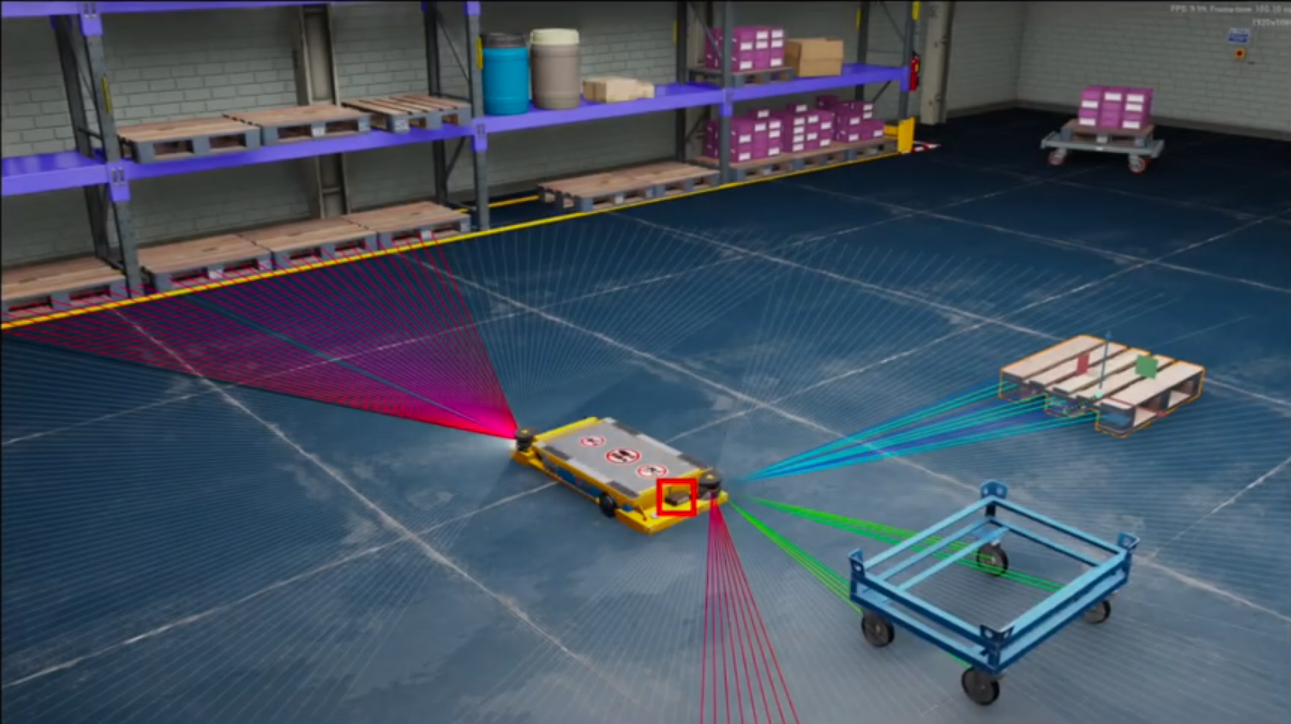
Our paper by Linus Ebere Nwankwo, Björn Ellensohn, Vedant Dave, Peter Hofer, Jan Forstner, Marlene Villneuve, Robert Galler, and Elmar Rueckert on ‘EnvoDat: A Large-Scale Multisensory Dataset for Robotic Spatial…Read More
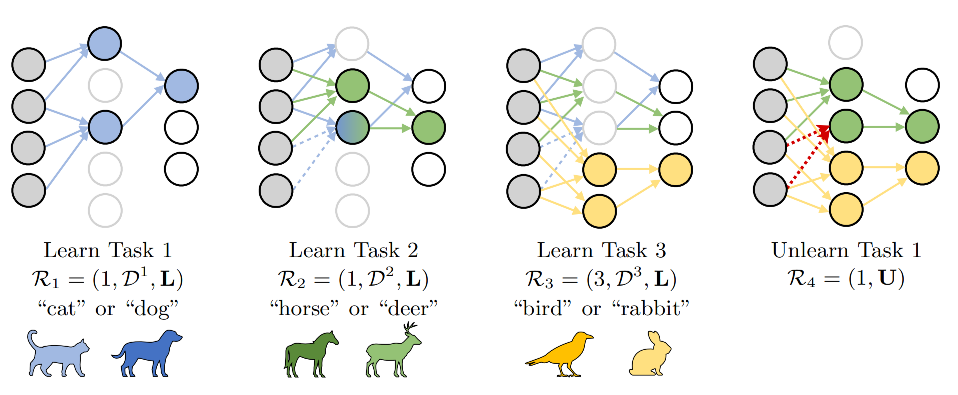
Our paper by Ozan Özdenizci, Elmar Rueckert and Robert Legenstein on ‘Privacy-Aware Lifelong Learning’ was accepted for publication at the International Conference on Learning Representations (ICLR 2025).
Our proposal, “Multi-modal, tactile-visual robotic gripping system for industrial applications” (German: “Multi-modale, taktile-visuelle Robotergreifsysteme für industrielle Anwendungen”), has been accepted for funding! Over the next three years, CPS will receive…Read More
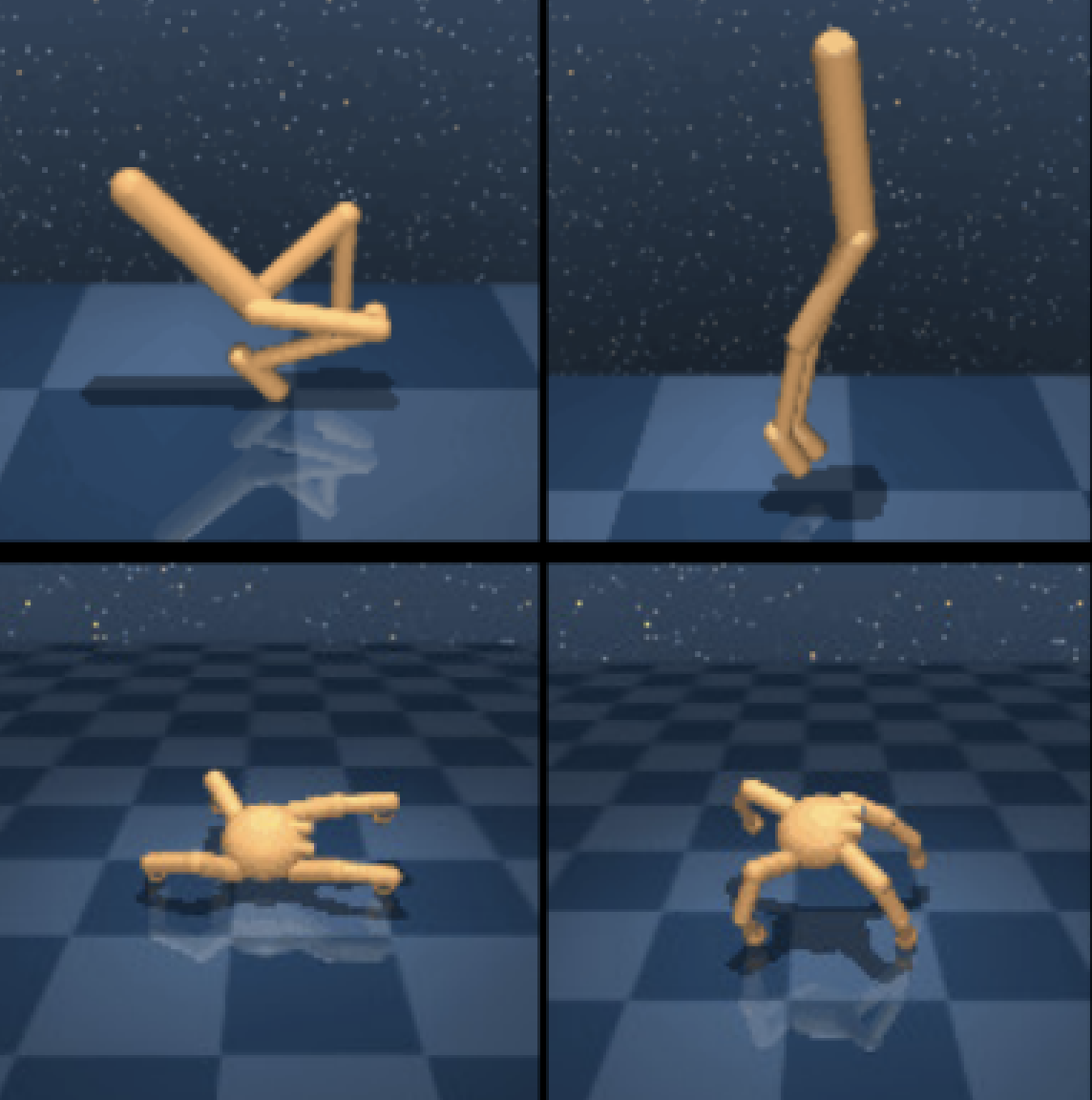
Our paper by Vedant Dave and Elmar Rueckert on ‘Skill Disentanglement in Reproducing Kernel Hilbert Space’ was accepted for publication at the AAAI Conference on Artificial Intelligence (AAAI 2025).
More news on Professor Rueckert’s page.