Integrated CPS Project or B.Sc./M.Sc. Thesis: Learning to Walk through Reinforcement Learning
Supervisor:
- Linus Nwankwo, M.S.c;
- Konrad Bartsch
- Univ.-Prof. Dr Elmar Rückert
Start date: ASAP, e.g., 1st of October 2022
Qualifications
- Interest in controlling and simulating legged robots
- Interest in Programming in Python and ROS or ROS2
Keywords: locomotion, robot control, robot operating system (ROS), ESP32
Introduction
For humans, walking and running are effortless provided good health conditions are satisfied. However, training bipedal or quadrupedal robots to do the same is still today a challenging problem for roboticists and researchers. Quadrupedal robots are known to exhibit complex nonlinear dynamics which makes it near impossible for control engineers to design an effective controller for its locomotion or task-specific actions.
Reinforcement learning in recent years has shown the most exciting and state-of-the-art artificial intelligence approaches to solving the above-mentioned problem. Although, other challenges, such as learning effective locomotion skills from scratch, transversing rough terrains, walking on a narrow balance beam [3], etc remains. Several researchers in their respective work have proved the possibilities of training quadrupedal robots to walk (fast or slow) or run (fast or slow) through reinforcement learning. Nevertheless, how efficient and effective these walking and running skills are achieved with real-time systems in comparison to humans or quadrupedal animals is still a task to solve.
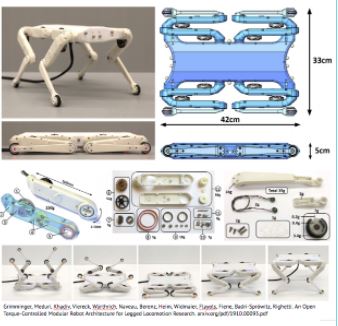
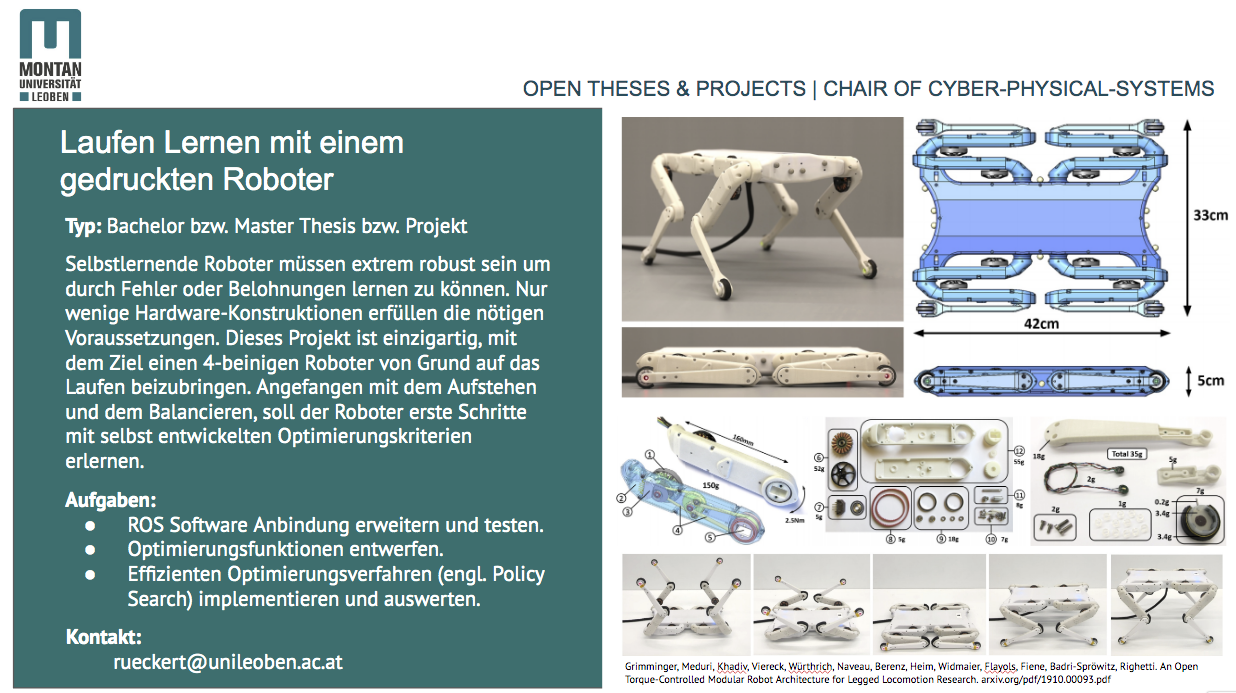
In the context of this thesis, we propose to study the concept of reinforcement learning and subsequently apply it to train our 3D printed quadrupedal robot in the figure above to walk and run. For this, we will leverage on the work of [1, 2] to explore the robots’ capabilities in generating very dynamic motions or task-specific locomotive actions through reinforcement learning.
Tentative Work Plan
The following concrete tasks will be focused on:
- study the concept of reinforcement learning as well as its application in quadruped robots for testing control and learning algorithms.
- apply reinforcement learning algorithms to train the robot to perform skill-specific tasks such as walking, running, etc.
- real-time experimentation, simulation (MATLAB, ROS & Gazebo, Rviz, C/C++, Python, etc) and validation.
References
[1] Felix Grimminger, Avadesh Meduri, Majid Khadiv, Julian Viereck, Manuel Wuthrich Maximilien Naveau, Vincent Berenz, Steve Heim, Felix Widmaier, Thomas Flayols Jonathan Fiene, Alexander Badri-Sprowitz and Ludovic Righetti, “An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research”, arXiv:1910.00093v2 [cs.RO] 23 Feb 2020.
[2] Tuomas Haarnoja, Sehoon Ha, Aurick Zhou, Jie Tan, George Tucker and Sergey Levine, Learning to Walk via Deep Reinforcement Learning, arXiv:1812.11103v3 [cs.LG] 19 Jun 2019.
[3] Haojie Shi1, Bo Zhou2, Hongsheng Zeng2, Fan Wang2y, Yueqiang Dong2, Jiangyong Li2, Kang Wang2, Hao Tian2, Max Q.-H. Meng, “Reinforcement Learning with Evolutionary Trajectory Generator: A General Approach for Quadrupedal Locomotion”, arXiv: 2109.0 6 4 09v1 [cs.RO] 14 Sep 2021.
Link: zur Folie