XMas 2024 – 6th of Dec 2024 – CeDi
Dear CPS team, thank you all very much for this successful year. We had a very nice Christmas party in our new building – the center of digitalization (CeDi), or in german – Das Haus der Digitalisierung.

Dear CPS team, thank you all very much for this successful year. We had a very nice Christmas party in our new building – the center of digitalization (CeDi), or in german – Das Haus der Digitalisierung.
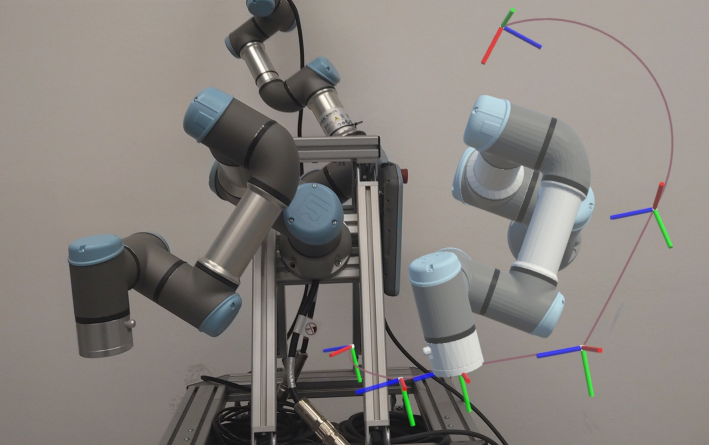
Unsere Forschung entwickelt intelligente Roboterhände, die fühlen können – ähnlich wie menschliche Hände. Mit innovativen Sensoren auf Basis von nachhaltigen Materialien wie Cellulose und Nanocellulose schaffen wir Lösungen, die nicht nur Druck und Temperatur spüren, sondern auch Schadstoffe und biologische Gefahren erkennen können.
Diese Technologie wird speziell für schwierige Aufgaben in der Industrie entwickelt, z. B. beim Sortieren von Abfällen oder empfindlichen Materialien, die bisher nur Menschen bewältigen konnten. Durch den Einsatz von Robotern in gefährlichen oder anstrengenden Arbeitsumfeldern schützen wir Menschen und verbessern die Arbeitsbedingungen.
Mit unseren nachhaltigen, langlebigen und präzisen Sensoren setzen wir neue Maßstäbe in der Automatisierung. Das stärkt nicht nur die heimische Wirtschaft, sondern bringt auch Innovation und Sicherheit für die Gesellschaft.
Österreichische Forschungsförderungsgesellschaft mbH (FFG)
Our research is developing intelligent robotic hands that can feel – just like human hands. Using innovative sensors based on sustainable materials such as cellulose and nanocellulose, we are creating solutions that not only sense pressure and temperature, but can also detect pollutants and biological hazards.
This technology is being developed specifically for difficult tasks in industry, such as sorting waste or sensitive materials that previously only humans could handle. By using robots in hazardous or strenuous working environments, we protect people and improve working conditions.
With our sustainable, durable and precise sensors, we are setting new standards in automation. This not only strengthens the domestic economy, but also brings innovation and safety to society.
TBA
TBA

Short bio: Ms. Eva Anderson joined the CPS team in February 2025 and is in charge of organizational and administrative matters. She earned her degree in commerce at the Vienna university of economics and business.
Mag. Eva Anderson
Sekretariat des Lehrstuhls für Cyber-Physical-Systems
Montanuniversität Leoben
Franz-Josef-Straße 18,
8700 Leoben, Austria
Phone: +43 3842 402 – 1907
Email: eva.anderson@unileoben.ac.at
Web: https://cps.unileoben.ac.at

Meta Quest 3 is a cutting-edge mixed reality headset designed to blend immersive VR experiences with real-world awareness. Featuring a sleek, ergonomic design, it delivers high-resolution visuals and enhanced comfort, making it ideal for extended use across gaming, productivity, and creative applications.
The headset offers improved performance with advanced optics, a powerful Snapdragon XR2 Gen 2 chipset, and intuitive controls. Its wireless design ensures freedom of movement, while an adjustable fit provides a comfortable experience for all users.
Meta Quest 3 integrates full-color passthrough and precise spatial mapping, enabling seamless transitions between virtual and physical environments. Its dynamic sensor suite tracks movement with precision, offering enhanced interaction and immersive AR overlays.
Paired with intuitive hand tracking, haptic controllers, and a robust content ecosystem, Meta Quest 3 redefines how users interact with digital and physical spaces, creating a versatile platform for both entertainment and productivity.

HoloLens 2 is a state-of-the-art mixed reality headset designed to enhance interaction, visualization, and control in various applications. With its ergonomic design and untethered operation, it offers an immersive AR experience, enabling seamless integration of virtual content into the real world.
The device features a high-resolution display with a wide field of view, advanced hand tracking, and eye-tracking capabilities for natural and intuitive interaction. Its lightweight, comfortable fit allows for extended use in diverse environments.
HoloLens 2 employs sophisticated spatial mapping and environmental awareness, enabling precise alignment of holographic content with the physical world. Its sensors and depth cameras deliver accurate 3D spatial understanding, making it ideal for simulation, visualization, and control tasks.
With voice commands, gesture recognition, and compatibility with industry-leading software, HoloLens 2 transforms workflows by providing hands-free operation and actionable insights in real time.
Die Montanuniversität Leoben ist eine moderne Lehr- und Forschungsstätte und bietet sehr gute
Voraussetzungen für Karrieren in wissenschaftlichen und nichtwissenschaftlichen Berufsfeldern.
Am Department Product Engineering – Lehrstuhl für Cyber-Physical-Systems gelangt die Stelle im
Sekretariat (m/w/d) zur Besetzung.
Für diese Position ist gemäß dem Kollektivvertrag für Arbeitnehmer*innen (m/w/d) der Universitäten die
Verwendungsgruppe IIb (€ 2.460,10 brutto, 14x jährlich) vorgesehen, tatsächliche Einstufung erfolgt
lt. anrechenbarer tätigkeitsspezifischer Vorerfahrung.
Vorgesehener Dienstantritt: ehest möglich
Beschäftigungsdauer: unbefristet
Beschäftigungsausmaß in Wochenstunden: 20 h (mit der Option auf Erhöhung des Beschäftigungsausmaßes ab Jänner 2026)
Wir bieten zahlreiche Benefits, unter anderem:
Referenznummer: 2411APC
Ende der Bewerbungsfrist: 12.12.2024
Personen mit Behinderung oder chronischen Erkrankungen, die, die geforderten Qualifikationskriterien
erfüllen, werden ausdrücklich zur Bewerbung aufgefordert.
Um eine geschlechtsneutrale Formulierung zu gewährleisten, werden geschlechterspezifische Artikel,
Pronomen und Adjektive im Text abgekürzt dargestellt.
Leider können die Reise- und Aufenthaltskosten, die aus Anlass des Aufnahmeverfahrens entstehen,
nicht vergütet werden. Die Aufnahmen erfolgen nach den Bestimmungen des Universitätsgesetzes
2002 (UG) und des Angestelltengesetzes.
Die Montanuniversität Leoben strebt eine Erhöhung des Frauenanteiles an und fordert deshalb
qualifizierte Frauen ausdrücklich zur Bewerbung auf. Frauen werden bei gleicher Qualifikation wie der
bestgeeignete Mitbewerber vorrangig aufgenommen.
Für Ihre Bewerbung verwenden Sie bitte unser Online Bewerbungsformular auf der Homepage:
https://www.unileoben.ac.at/jobs

The GelSight Mini is an affordable, compact tactile sensor that provides high-resolution 2D and 3D surface mapping. Its plug-and-play design enables users to begin operations within five minutes of setup. Key features include:
High-Performance Mapping: Delivers detailed 2D and 3D surface imagery, capturing fine textures and features.
AI Integration: Compatible with existing computer vision techniques and software, facilitating AI training and research.
Compact and Robust Design: Easily integrates into various robotic systems and withstands rigorous prototyping environments.
Quick Gel Replacement: Allows toolless and rapid gel changes, enhancing efficiency during iterative testing.
The GelSight Mini is suitable for professionals, academics, and hobbyists interested in touch-based interfaces, robotics, and industrial scanning. Its user-friendly interface and affordability make it an accessible tool for advancing tactile sensing applications
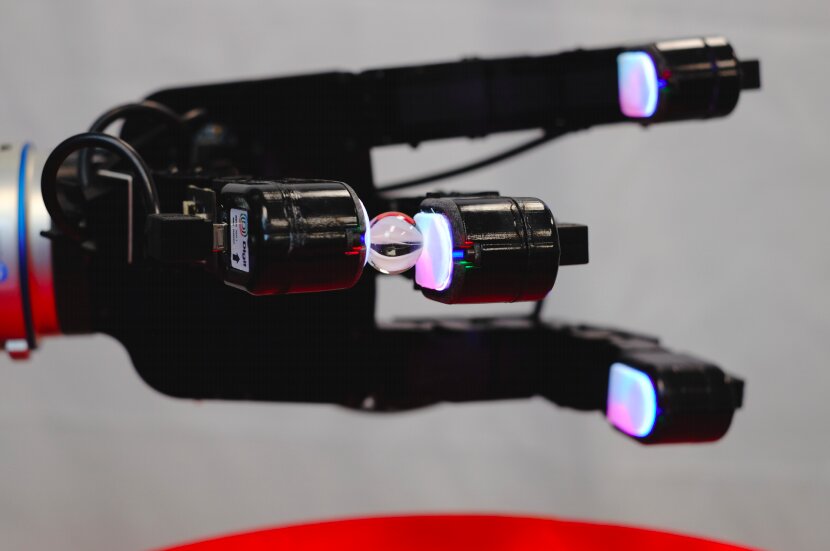
The DIGIT sensor is a compact, low-cost, and high-resolution vision-based tactile sensor designed for in-hand robotic manipulation tasks. It improves upon traditional tactile sensors by offering a smaller form factor, enhanced durability, and streamlined manufacturing, making it suitable for multi-fingered robotic hands. DIGIT utilizes an elastomer surface to measure contact forces via image deformation captured by an embedded camera, delivering precise tactile feedback. Its modular design allows easy replacement of components, supports task-specific elastomers, and ensures robustness under repeated use. With a cost of approximately $15 per unit in batch manufacturing, DIGIT provides an accessible and effective solution for tactile sensing in robotics.

The LEAP Hand is a low-cost, efficient, and anthropomorphic robotic hand designed for dexterous manipulation and robot learning. The hand is robust, durable, and capable of exerting large torques over extended periods. With a novel kinematic structure that retains all degrees of freedom in any finger position, it supports a wide range of manipulation tasks, including grasping, teleoperation, and in-hand object rotation. The LEAP Hand is open-source, with detailed assembly instructions, simulation tools, and APIs, making it accessible and scalable for research and development.
Christian is a Senior Scientist at CPS. He received his Ph.D. in “Robotics and Autonomous Systems” from the University of Edinburgh in 2020 under the supervision of Prof. Maurice Fallon and Prof. Timothy Hospedales, and later joined the Statistical Machine Learning and Motor Control Group under supervision of Prof. Sethu Vijayakumar. After a period at the Bosch Center for Artificial Intelligence, he returned to academia in 2025.
His research lies at the intersection of robotics, computer vision, and machine learning, with a focus on enabling interactive manipulation in unknown and unstructured environments.

Machine learning, Robot Learning, Robot Vision, Perception and Manipulation.
Dr. Christian Rauch
Research Group Leader at the Chair of Cyber-Physical-Systems
Montanuniversität Leoben
Franz-Josef-Straße 18,
8700 Leoben, Austria
Phone: +43 3842 402 – 1908
Email: the format of the address is first name dot last name at domain of the university
Chat: https://unileoben.webex.com/meet/christian.rauch
![]()