Active transfer learning with neural networks through human-robot interactions (TRAIN)
DFG Project 07/2020-01/2025
In our vision, autonomous robots are interacting with humans at industrial sites, in health care, or at our homes managing the household. From a technical perspective, all these application domains require that robots process large amounts of data of noisy sensor observations during the execution of thousands of different motor and manipulation skills. From the perspective of many users, programming these skills manually or using recent learning approaches, which are mostly operable only by experts, will not be feasible to use intelligent autonomous systems in tasks of everyday life.
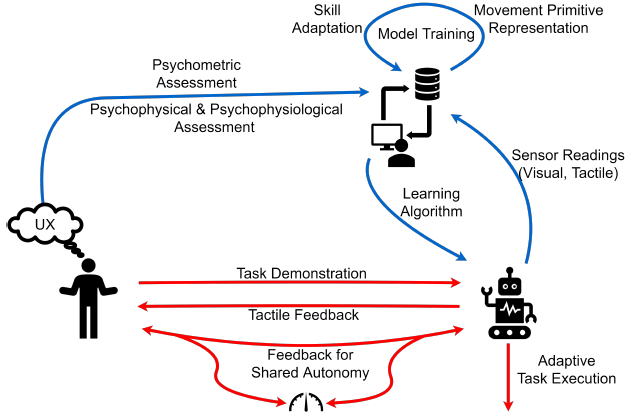
In this project, we aim at improving robot skill learning with deep networks considering human feedback and guidance. The human teacher is rating different transfer learning strategies in the artificial neural network to improve the learning of novel skills by optimally exploiting existing encoded knowledge. Neural networks are ideally suited for this task as we can gradually increase the number of transferred parameters and can even transition between the transfer of task specific knowledge to abstract features encoded in deeper layers. To consider this systematically, we evaluate subjective feedback and physiological data from user experiments and elaborate assessment criteria that enable the development of human-oriented transfer learning methods. In two main experiments, we first investigate how users experience transfer learning and then examine the influence of shared autonomy of humans and robots. This will result in a methodical robot skill learning framework that adapts to the users’ needs, e.g., by adjusting the degree of autonomy of the robot to laymen requirements. Even though we evaluate the learning framework focusing on pick and place tasks with anthropomorphic robot arms, our results will be transferable to a broad range of human-robot interaction scenarios including collaborative manipulation tasks in production and assembly, but also for designing advanced controls for rehabilitation and household robots.
Project Consortium
-
Friedrich-Alexander-Universität Erlangen-Nürnberg
- Montanuniversität Leoben
Links
Details on the research project can be found on the project webpage.
Publications
2021 |
|
SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). | 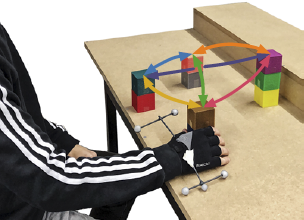 |
Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). |  |
Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. | |
2020 |
|
Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS’ 2020), 2020. |  |
Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. |  |