Robot How to Build a USB Controlled Treadmill
This post discusses how to develop a low cost treadmill with a closed-loop feedback controller for reinforcement learning experiments.
MATLAB and JAVA code is linked.
Code & Links
- Pre-build java library
- Source code of the developer version
The Treadmill
- Get a standard household treadmill Samples
- Note: It should work with a DC-Motor, otherwise a different controller is needed!
The Controller and the Distance Sensor
- Pololu Jrk 21v3 USB Motor Controller with Feedback or stronger (max. 28V, 3A)
- Comes with a Windows Gui to specify the control gains
- Sharp distance sensor GP2Y0A21, 10 cm – 80 cm or similar
- USB cable
- Cable for the distance sensor
- Power cables for the treadmill
- Controller User Guide by Polo
The Matlab Interface
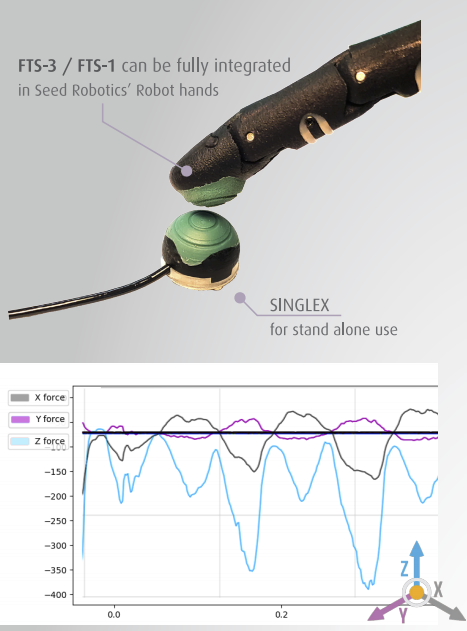
- Get the java library build or the developer version, both from Sept 2015 created by E. Rueckert.
- Run the install script
installFTSensor.m(which add the jar to your classpath.txt) - Check the
testFTSensor.mscript which builds on the wrapper class MatlabFTCL5040Sensor (you need to add this file to your path)