2021
|
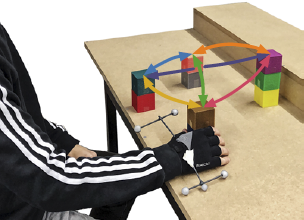
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
2020
|
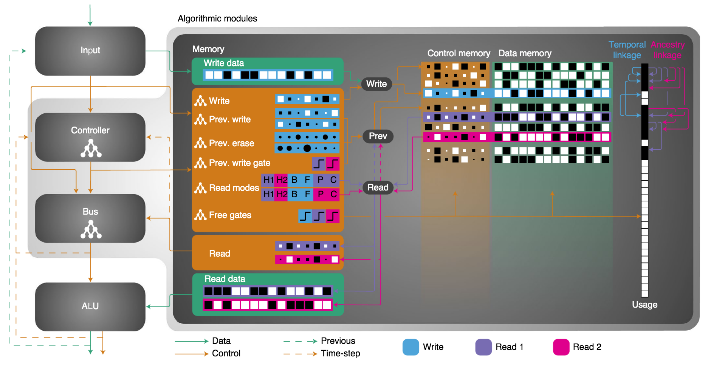
Tanneberg, Daniel; Rueckert, Elmar; Peters, Jan Evolutionary training and abstraction yields algorithmic generalization of neural computers Journal Article In: Nature Machine Intelligence, pp. 1–11, 2020. @article{Tanneberg2020,
title = {Evolutionary training and abstraction yields algorithmic generalization of neural computers},
author = {Daniel Tanneberg and Elmar Rueckert and Jan Peters },
url = {https://rdcu.be/caRlg, Article File},
doi = {10.1038/s42256-020-00255-1},
year = {2020},
date = {2020-10-10},
journal = {Nature Machine Intelligence},
pages = {1--11},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
2019
|
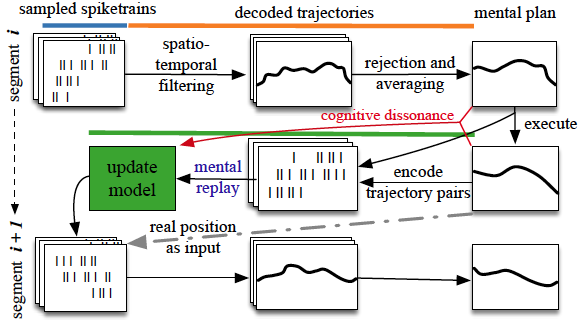
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks Journal Article In: Neural Networks - Elsevier, vol. 109, pp. 67-80, 2019, ISBN: 0893-6080, (Impact Factor of 7.197 (2017)). @article{Tanneberg2019,
title = {Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/NeuralNetworks2018Tanneberg.pdf, Article File},
doi = {10.1016/j.neunet.2018.10.005},
isbn = {0893-6080},
year = {2019},
date = {2019-01-01},
journal = {Neural Networks - Elsevier},
volume = {109},
pages = {67-80},
note = {Impact Factor of 7.197 (2017)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
2017
|
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Efficient Online Adaptation with Stochastic Recurrent Neural Networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Tanneberg2017a,
title = {Efficient Online Adaptation with Stochastic Recurrent Neural Networks},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11092},
key = {goal-robots, skills4robots},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Thiem, Simon; Stark, Svenja; Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Simulation of the underactuated Sake Robotics Gripper in V-REP Conference Workshop at the International Conference on Humanoid Robots (HUMANOIDS), 2017. @conference{Thiem2017b,
title = {Simulation of the underactuated Sake Robotics Gripper in V-REP},
author = {Simon Thiem and Svenja Stark and Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Thiem.pdf},
year = {2017},
date = {2017-11-15},
urldate = {2017-11-15},
booktitle = {Workshop at the International Conference on Humanoid Robots (HUMANOIDS)},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
|  |
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals Proceedings Article In: Proceedings of the Conference on Robot Learning (CoRL), 2017. @inproceedings{Tanneberg2017,
title = {Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/CoRL2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-10},
booktitle = {Proceedings of the Conference on Robot Learning (CoRL)},
crossref = {p11088},
key = {goal-robots, skills4robots},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
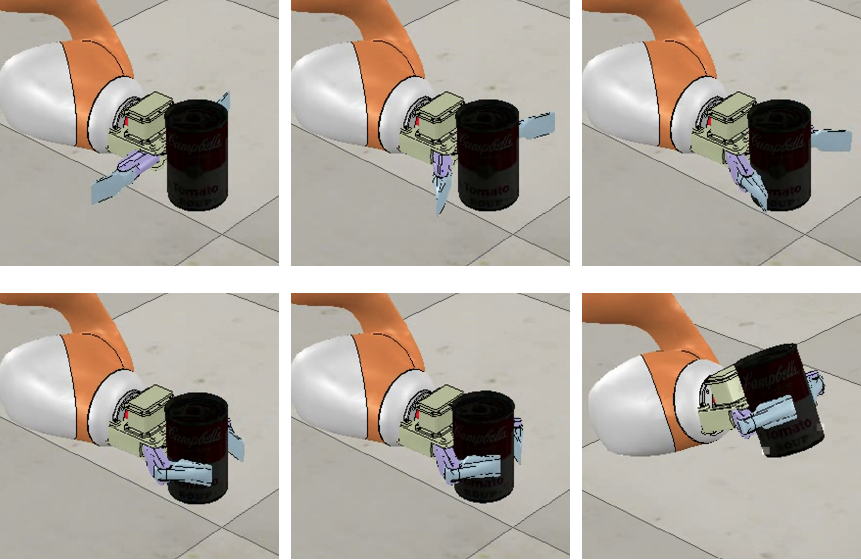
Tanneberg, Daniel; Paraschos, Alexandros; Peters, Jan; Rueckert, Elmar Deep Spiking Networks for Model-based Planning in Humanoids Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{tanneberg_humanoids16,
title = {Deep Spiking Networks for Model-based Planning in Humanoids},
author = {Daniel Tanneberg and Alexandros Paraschos and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Tanneberg.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/videos/humanoids_slower_540p.mp4, Supplementary Video},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10980},
key = {codyco and tacman},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
| 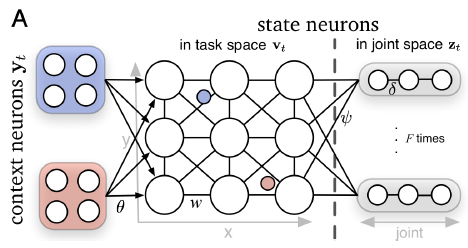 |
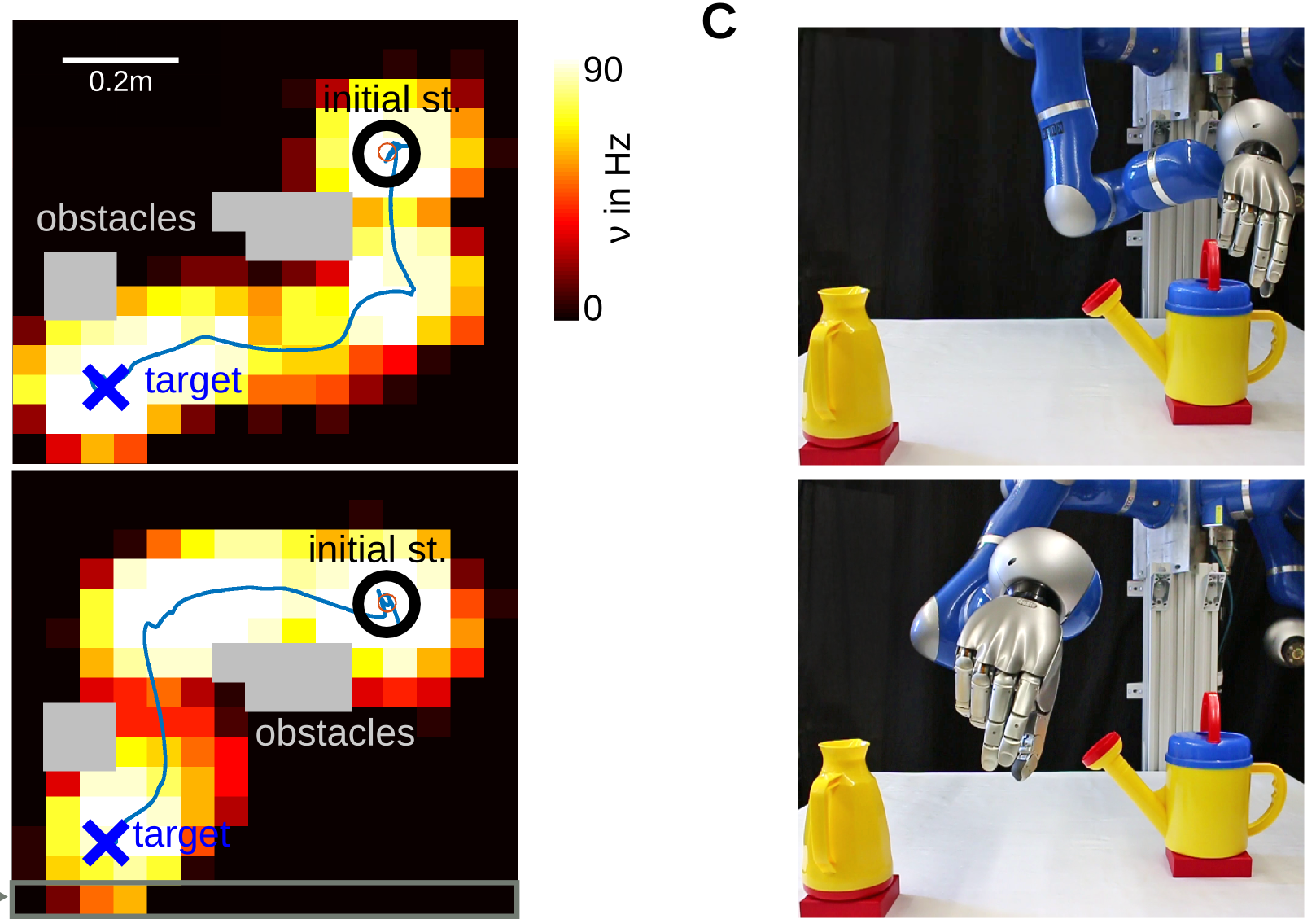
Rueckert, Elmar; Kappel, David; Tanneberg, Daniel; Pecevski, Dejan; Peters, Jan Recurrent Spiking Networks Solve Planning Tasks Journal Article In: Nature Publishing Group: Scientific Reports, vol. 6, no. 21142, 2016. @article{Rueckert2016a,
title = {Recurrent Spiking Networks Solve Planning Tasks},
author = {Elmar Rueckert and David Kappel and Daniel Tanneberg and Dejan Pecevski and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning.pdf, Article File
https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning_Supplement.pdf, Supplement
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SpikingNeuralPlanning_2016Rueckert.zip, MATLAB Code},
doi = {10.1038/srep21142},
year = {2016},
date = {2016-01-15},
journal = {Nature Publishing Group: Scientific Reports},
volume = {6},
number = {21142},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
Sharma, David; Tanneberg, Daniel; Grosse-Wentrup, Moritz; Peters, Jan; Rueckert, Elmar Adaptive Training Strategies for BCIs Proceedings Article In: Cybathlon Symposium, 2016. @inproceedings{Sharma2016,
title = {Adaptive Training Strategies for BCIs},
author = {David Sharma and Daniel Tanneberg and Moritz Grosse-Wentrup and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Cybathlon2016Sharma.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Cybathlon Symposium},
crossref = {p10952},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
