

2019 |
|
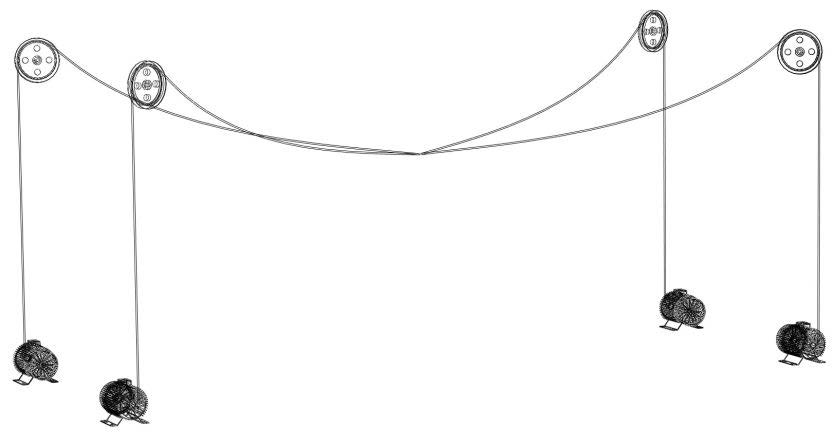
Dynamic Control Strategies for Cable-Driven Master Slave Robots Proceedings Article In: Keck, Tobias (Ed.): Proceedings on Minimally Invasive Surgery, Luebeck, Germany, 2019, (January 24-25, 2019). | 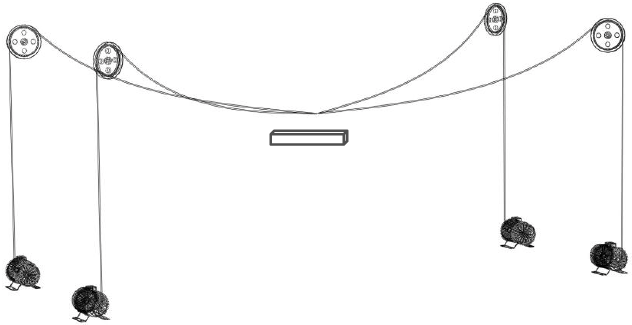 |
2019 |
|
Dynamic Control Strategies for Cable-Driven Master Slave Robots Proceedings Article In: Keck, Tobias (Ed.): Proceedings on Minimally Invasive Surgery, Luebeck, Germany, 2019, (January 24-25, 2019). | |