Aleyna Yilmaz (Secretary)


The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible.
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• PhD: up to 4 years (including completion of the doctoral degree)
• Postdoc: initially 2 years, with the option for extension
Research Focus
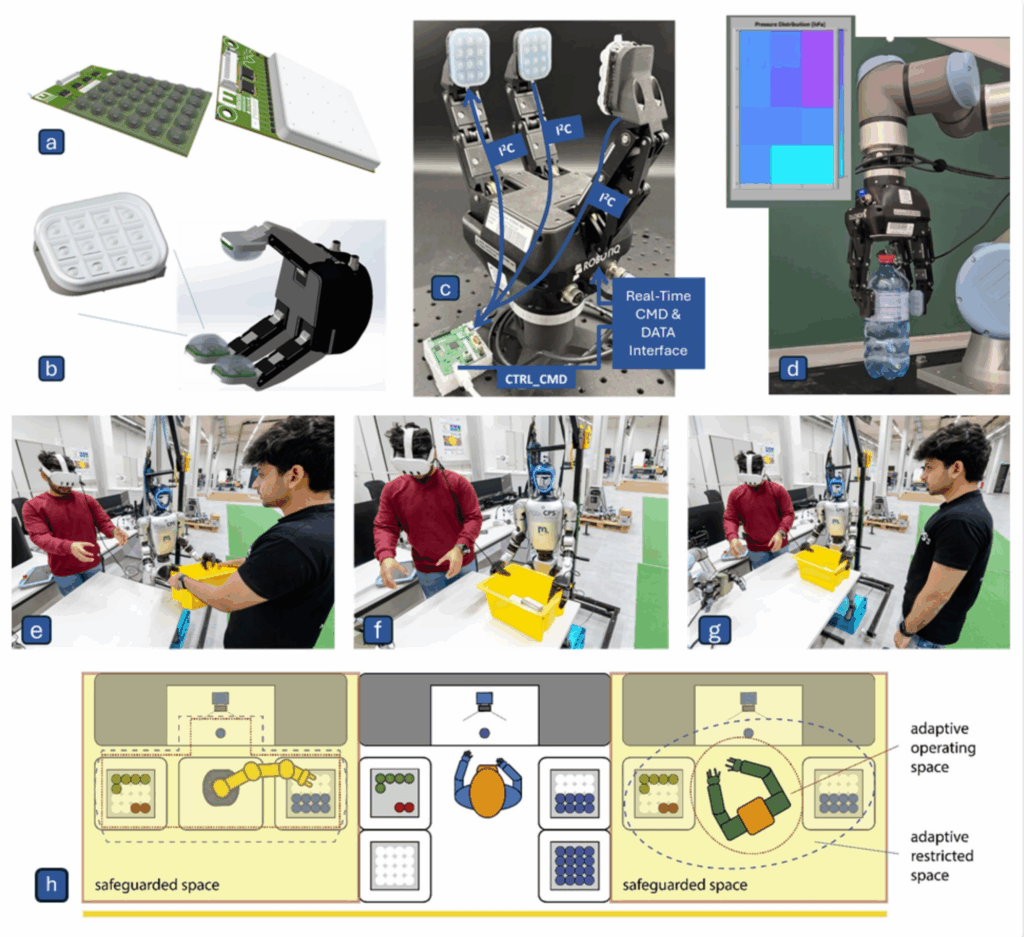
The positions are part of projects aiming to unlock the potential of humanoid robots in industrial environments. Our research focuses on learning-based methods for robust, adaptive, and generalizable robot skills, including:
• Whole-body control of humanoid robots in teleoperation and learning-based environments
This research position will focus on multiple aspects of these topics, with a special emphasis on humanoid robot skill learning of industrial applications.
What we offer
• A dynamic and collaborative research environment in artificial intelligence and robotics
• The opportunity to develop your own research ideas and work on cutting-edge projects
• Access to state-of-the-art lab facilities
• International research collaborations and conference travel opportunities
• Targeted career guidance for a successful academic and research career
The figure below illustrates an example application of the project, focusing on learning manipulation tasks with objects on a conveyor belt. The picture above is an artwork created out of that picture from our research lab.

Requirements
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in writing a PhD dissertation
Desired additional qualifications
• Programming experience in C, C++, C#, Java, MATLAB, Python, or a similar language
• Familiarity with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel for research collaborations and technical presentations
Application & Materials
A complete application includes:
1. Curriculum Vitae (CV) (detailed)
2. Letter of Motivation – State if you apply for the Ph.D. or the postdoc position
3. Master’s or Ph.D. Thesis (PDF or link)
4. Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
5. Letter(s) of Recommendation
6. Contact Information for References (name, email, phone)
7. Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.Research Focus