

Supervisor: Linus Nwankwo, M.Sc.;
Univ.-Prof. Dr Elmar Rückert
Start date: As soon as possible
Theoretical difficulty: mid
Practical difficulty: High
Abstract
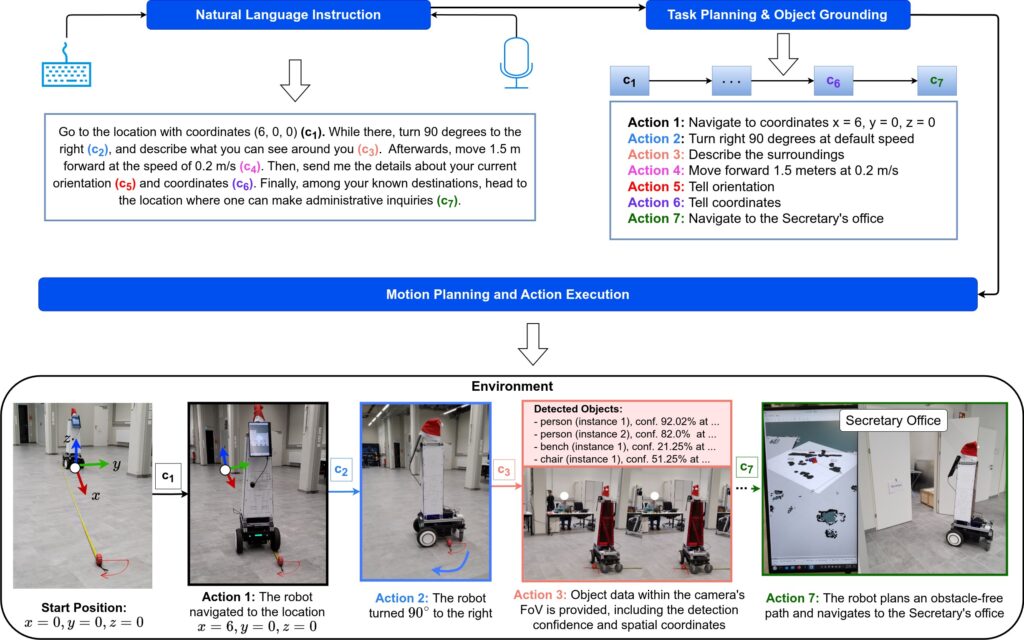
The goal of this thesis is to enhance the method proposed in [1] to enable autonomous robots to effectively interpret open-ended language commands, plan actions, and adapt to dynamic environments.
The scope is limited to grounding the semantic understanding of large-scale pre-trained language and multimodal vision
language models to physical sensor data that enables autonomous agents to execute complex, long-horizon tasks without task-specific programming. The expected outcomes include a unified framework for language-driven autonomy, a method for cross-modal alignment, and real-world validation.
Tentative Work Plan
To achieve the objectives, the following concrete tasks will be focused on:
- Backgrounds and Setup:
- Study LLM-for-robotics papers (e.g., ReLI [1], Code-as-Policies [2], ProgPrompt [3]), vision-language models (CLIP, LLaVA).
- Set up a ROS/Isaac Sim simulation environment and build a robot model (URDF) for the simulation (optional if you wish to use an existing one).
- Familiarise with how LLMs and VLMs can be grounded for short-horizon robotic tasks (e.g., “Move towards the {color} block near the {object}”), in static environments.
- Recommended programming tools: C++, Python, Matlab.
- Modular Pipeline Design:
- Speech/Text (Task Instruction) ⇾ LLM (Task Planning) ⇾ CLIP (Object Grounding) ⇾ Motion Planner (e.g., move towards the {colour} block near the {object}) ⇾ Execution (In simulation or real-world environment).
- Intermediate Presentation:
- Present the results of your background study or what you must have done so far.
- Detailed planning of the next steps.
- Implementation & Real-World Testing (If Possible):
- Test the implemented pipeline with a Gazebo-simulated quadruped or differential drive robot.
- Perform real-world testing of the developed framework with our Unitree Go1 quadruped robot or with our Segway RMP 220 Lite robot.
- Analyse and compare the model’s performance in real-world scenarios versus simulations with the different LLMs and VLMs pipelines.
- Validate with 50+ language commands in both simulation and the real world.
- Optimise the Pipeline for Optimal Performance and Efficiency (Optional):
- Validate the model to identify bottlenecks within the robot’s task environment.
- Documentation and Thesis Writing:
- Document the entire process, methodologies, and tools used.
- Analyse and interpret the results.
- Draft the thesis, ensuring that the primary objectives are achieved.
- Chapters: Introduction, Background (LLMs/VLMs in robotics), Methodology, Results, Conclusion.
- Deliverables: Code repository, simulation demo video, thesis document.
- Research Paper Writing (optional)