












News

Our joint proposal on “AI for recycling 2022” (germ. Künstliche Intelligenz für Recycling 2022) was granted by the Austrian Research Promotion Agency (FFG). The project starts in March/April 2023 and…Read More

The paper on End-To-End Deep Reinforcement Learning for First-Person Pedestrian Visual Navigation in Urban Environments by Honghu Xue, Rui Song, Julian Petzold, Benedikt Hein, Heiko Hamann and Rueckert Elmar was…Read More

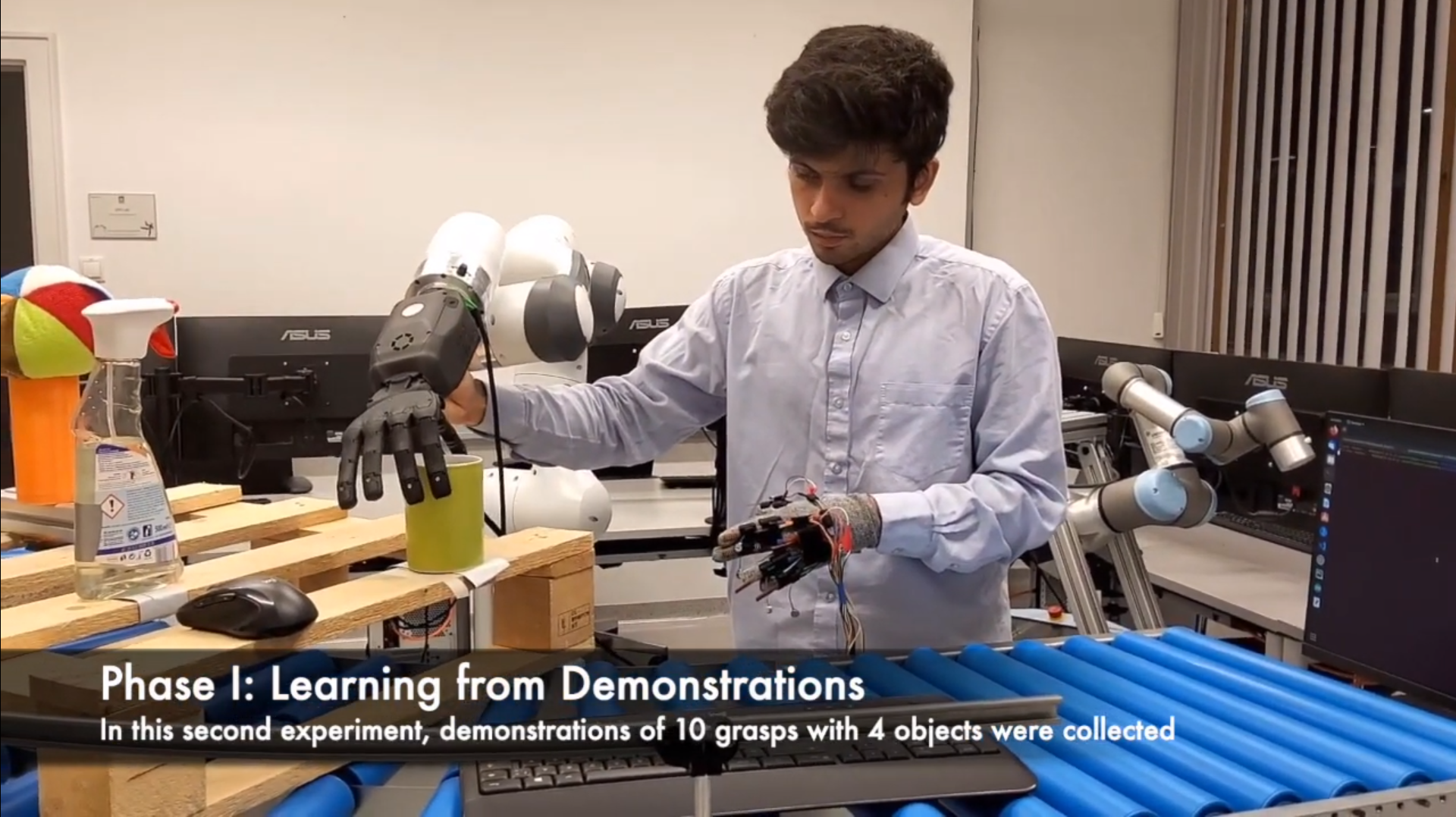
The paper on Predicting full-arm grasping motions from anticipated tactile responsess by Dave Vedant and Rueckert Elmar was accepted for publication at the International Conference on Humanoid Robots (Humanoids 2022),…Read More
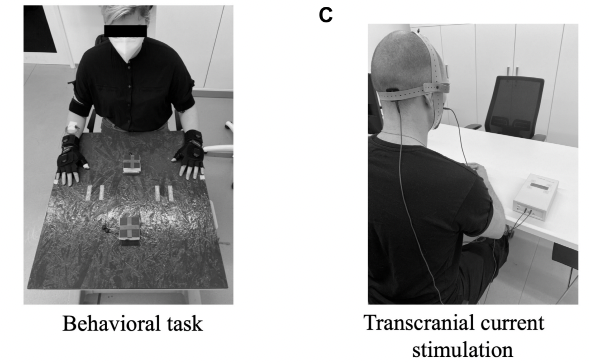
The paper by Rebecca Herzog and Till M Berger and Martje Gesine Pauly and Honghu Xue and Elmar Rueckert and Alexander Munchau and Tobias Bäumer and Anne Weissbach on “Cerebellar…Read More
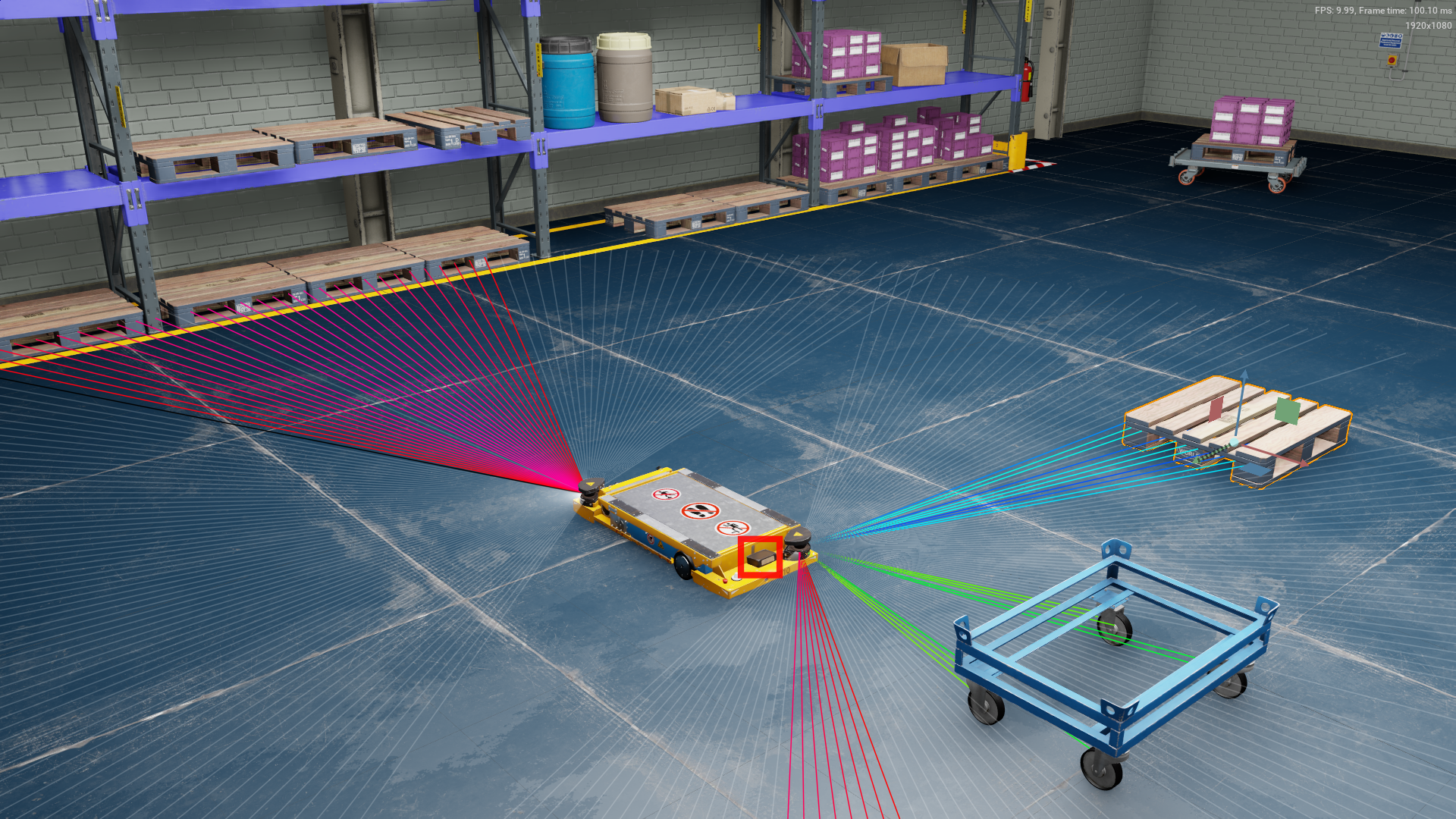
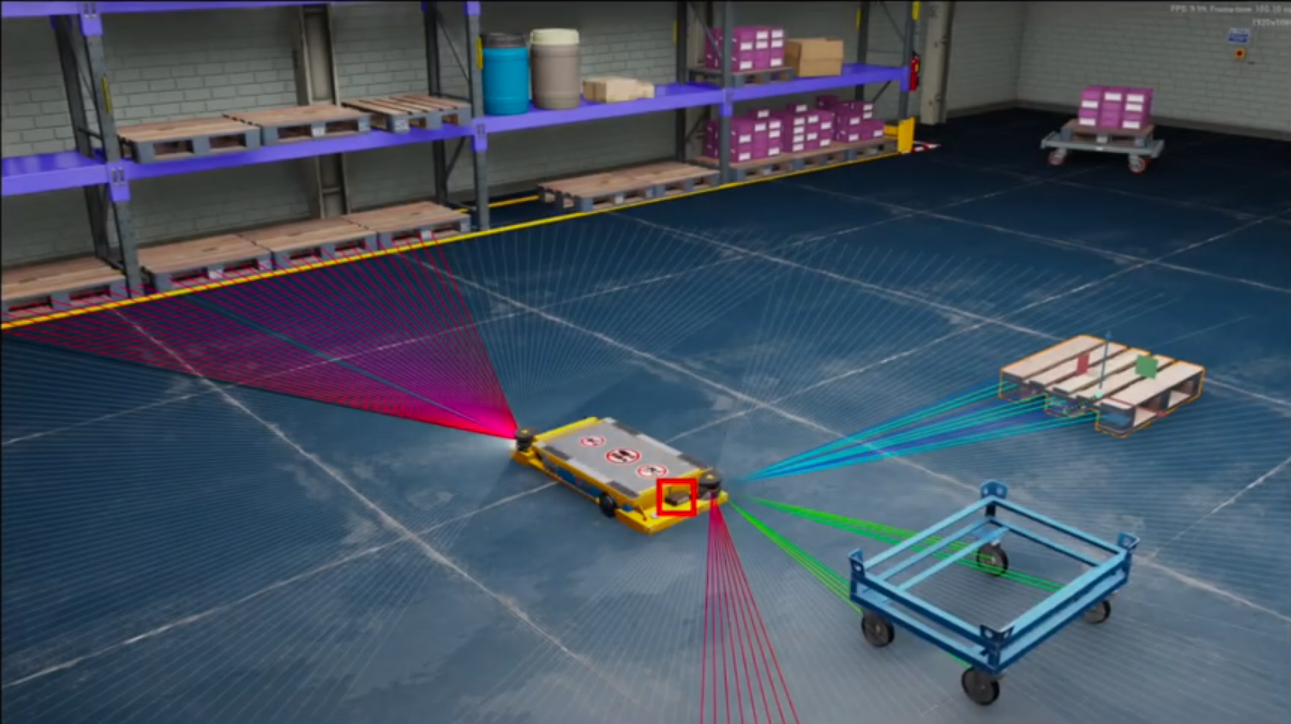
The paper by Honghu Xue and Benedikt Hein and Mohamed Bakr and Georg Schildbach and Bengt Abel and Elmar Rueckert on “Using Deep Reinforcement Learning with Automatic Curriculum Learning for…Read More
Our grant application for building an AI Robot Lab was funded. We will set up an industrial robot learning lab with two universal robotics UR3e arms, two FANUC CRX10iA robot…Read More
More news on Professor Rueckert’s page.