The Chair of Cyber-Physical Systems at the Technical University Leoben, led by Prof. Dr. Elmar Rueckert, conducts research at the intersection of artificial intelligence and autonomous systems.
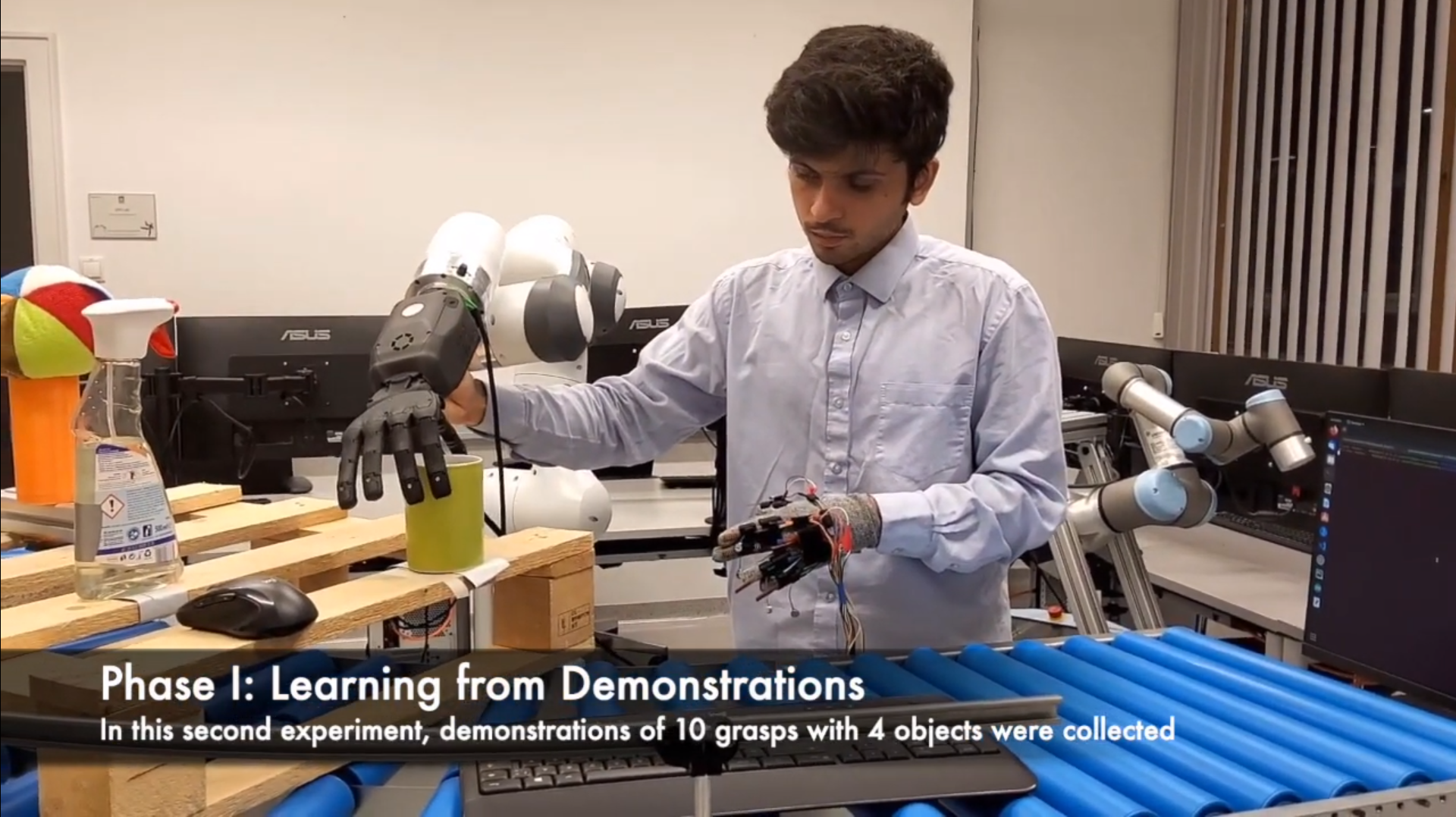
Our work focuses on developing foundation models for robotics and exploring robot skill learning, including dexterous and visual–tactile manipulation, reinforcement learning, self-supervised,active / interactive, and intrinsically motivated learning. We are particularly interested in inference and reasoning mechanisms that enable robots to generalize and adapt across complex environments.
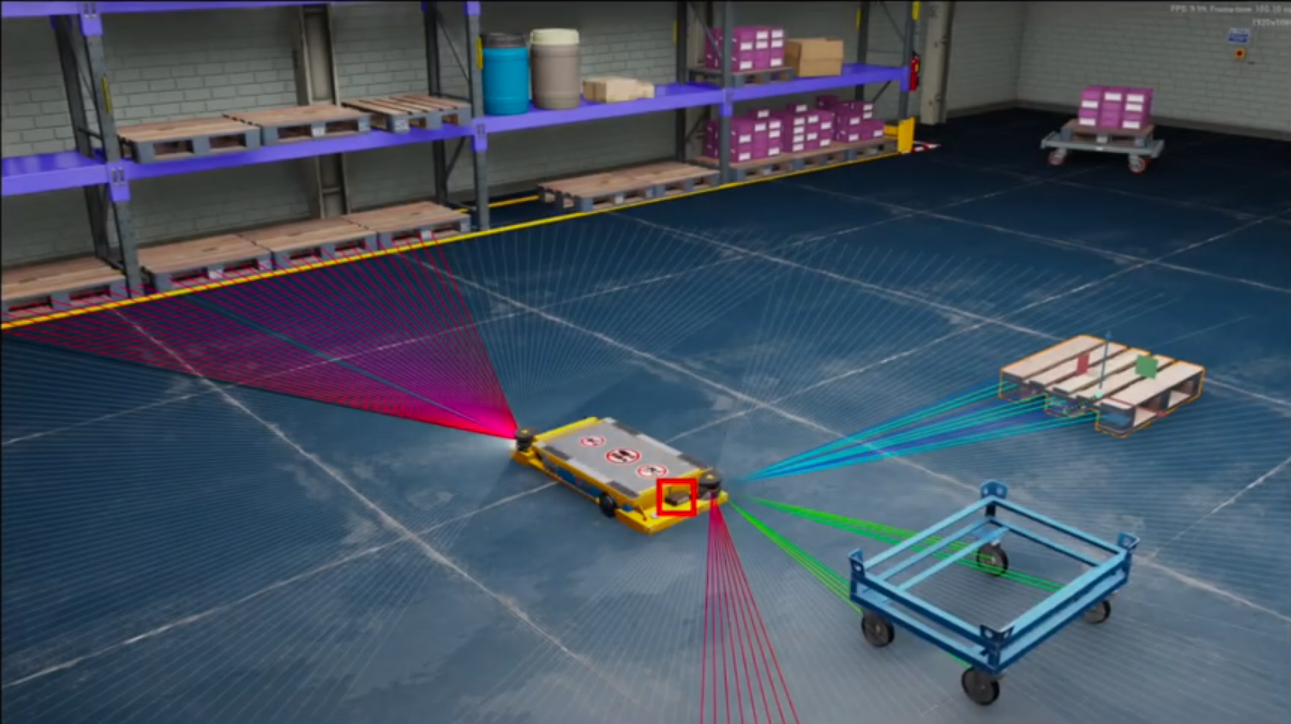
Application domains include humanoid robotics and autonomous systems for real-world tasks,industrial production, recycling, and mining, where our goal is to advance safety, efficiency, and sustainability through intelligent, adaptable robotic solutions.
Nils Rottmann, Ralf Bruder, Achim Schweikard, Elmar Rueckert A novel Chlorophyll Fluorescence based approach for Mowing Area Classification accepted (Oct, 12th 2020) at IEEE Sensors Journal with an Impact Factor of 3…Read More
The paper by Nils Rottmann, Ralf Burder, Achim Schweikard und Elmar Rueckert on Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors was accepted for publication at the IEEE…Read More
Our workshop on „New Horizons for Robot Learning“ was accepted at the International Conference on Intelligent Robots and Systems (IROS’ 2020). See https://iros.ai-lab.science
The paper by Tolga-Can Çallar, Elmar Rueckert and Sven Böttger on “Efficient Body Registration Using Single-View Range Imaging and Generic Shape Templates” was accepted for publication in the 54th Annual…Read More
The paper by Nils Rottmann, Tjaša Kunavar, Jan Babič, Jan Peters and Elmar Rueckert on “Learning Hierarchical Acquisition Functions for Bayesian Optimization” was accepted for publication at the International Conference…Read More
E. Cartoni, F. Mannella, V.G. Santucci, J. Triesch, E. Rueckert, G. Baldassarre. REAL-2019: Robot open-Ended Autonomous Learning competition. Proceedings of Machine Learning Research 123:142-152, 2020. NeurIPS 2019 Competition and Demonstration…Read More
The paper by Honghu Xue, Sven Boettger, Nils Rottmann, Harit Pandya, Ralf Bruder, Gerhard Neumann, Achim Schweikard and Elmar Rueckert on “Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts…Read More
Together with Prof. Philipp Beckerle from the TU Dortmund, we got our research project on ‘Active transfer learning with neural networks through human-robot interactions’ granted.
Prof. Rueckert won the ’German AI-Young Researcher Price 2019’ (germ. deutscher KI-Nachwuchspreis 2019) by Bilanz & McKinsey – KI-Denker der Zukunft. The awards ceremony was on Sept. 26th, 2019. The…Read More
for the paper: Probabilistic Movement Primitives under Unknown System Dynamics, by Paraschos, Alexandros and Rueckert, Elmar and Peters, Jan and Neumann, Gerhard. Advanced Robotics (ARJ), 32 (6), pp. 297-310, 2018.
The paper by Nils Rottmann, Ralf Bruder, Achim Schweikard and Elmar Rueckert on “Loop Closure Detection in Closed Environments” was accepted for publication at the 2019 European Conference on Mobile Robots…Read More
The paper by Svenja Stark, Jan Peters and Elmar Rueckert on “Experience Reuse with Probabilistic Movement Primitives” was accepted for publication in the Proceedings of the 2019 IEEE/RSJ International Conference on…Read More
Das Projekt Autonome Elektrofahrzeuge als urbane Lieferanten wird im Rahmen des Programms „Our Common Future“ von der Robert Bosch Stiftung gefördert. Projektstart ist der 01.07.2019 bis 30.10.2021 More at: https://future.ai-lab.science
Fachausschusses FA1.60 zu Grundlagen lernender intelligenter Systeme, Gründungsmitglieder: Barbara Hammer (Universität Bielefeld), Elmar Rückert (gewählter Vorsitzender), Georg Schildbach (Universität zu Lübeck), Gerhard Neumann (Universität Tübingen), Heinz Koeppl (Technische Universität Darmstadt),…Read More