Author: Elmar Rueckert


1 PhD or Postdoc Position – Robot Learning (open topic)
The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible.
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• Duration:
• PhD: up to 4 years (including completion of the doctoral degree)
• Postdoc: initially 2 years, with the option for extension
Research Focus
The positions are part of projects aiming to unlock the potential of humanoid robots in industrial environments. Our research focuses on learning-based methods for robust, adaptive, and generalizable robot skills, including:
• Whole-body control of humanoid robots in teleoperation and learning-based environments
• Robot skill learning using modern generative and reinforcement learning approaches
• Multi-modal robot learning utilizing vision, acoustic, and tactile sensing
• Simulation-based learning and sim-to-real transfer for robust deployment
• Adaptive manipulation and motion planning in dynamic and unstructured environments
This research position will focus on multiple aspects of these topics, with a special emphasis on humanoid robot skill learning of industrial applications.
What we offer
• A dynamic and collaborative research environment in artificial intelligence and robotics
• The opportunity to develop your own research ideas and work on cutting-edge projects
• Access to state-of-the-art lab facilities
• International research collaborations and conference travel opportunities
• Targeted career guidance for a successful academic and research career
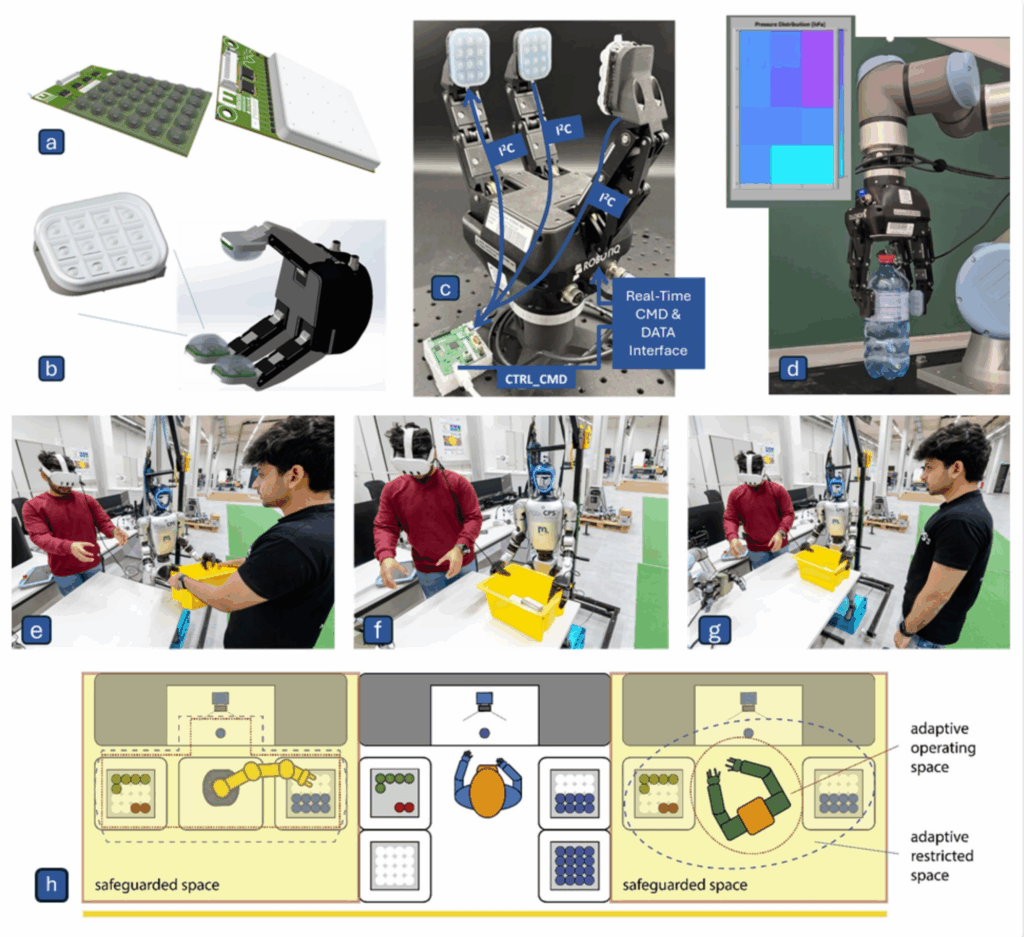
The figure below illustrates an example application of the project, focusing on learning manipulation tasks with objects on a conveyor belt. The picture above is an artwork created out of that picture from our research lab.

Requirements
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• For postdoctoral candidates: A completed Ph.D. in a topic related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in writing a PhD dissertation
Desired additional qualifications
• Programming experience in C, C++, C#, Java, MATLAB, Python, or a similar language
• Familiarity with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel for research collaborations and technical presentations
Application & Materials
A complete application includes:
1. Curriculum Vitae (CV) (detailed)
2. Letter of Motivation – State if you apply for the Ph.D. or the postdoc position
3. Master’s or Ph.D. Thesis (PDF or link)
4. Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
5. Letter(s) of Recommendation
6. Contact Information for References (name, email, phone)
7. Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.Research Focus
1 PhD Position – Humanoid Robot Learning (FFG RoboWork)
The Chair of Cyber-Physical Systems at Montanuniversitaet Leoben in Austria is offering a full-time position (100% employment) starting as soon as possible.
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• Employment Type: Full-time (40 hours/week) – PhD student or Postdoc
• Salary: €3,776.10/month (Ph.D.) or €5,014.30/month (postdoc), paid 14 times per year
• Duration:
• PhD: up to 4 years (including completion of the doctoral degree)
• Postdoc: initially 2 years, with the option for extension
About the Position
The RoboWork project aims to unlock the full potential of humanoid robots in industrial environments, paving the way for their effective and reliable deployment in future workplaces.
• Postdoc: initially 2 years, with the option for extension
About the Position
The RoboWork project aims to unlock the full potential of humanoid robots in industrial environments, paving the way for their effective and reliable deployment in future workplaces.
We are at the forefront of developing cutting-edge machine learning algorithms for robot skill learning for industrial applications, including:
• Whole-body control of humanoid robots in teleoperation and learning-based environments
• Robot skill learning using modern generative and reinforcement learning approaches
• Multi-modal robot control utilizing vision, acoustic, and tactile sensing
• Simulation-based learning and sim-to-real transfer for robust deployment
• Adaptive manipulation and motion planning in dynamic and unstructured environments
This research position will focus on multiple aspects of these topics, with a special emphasis on humanoid robot skill learning of industrial applications.
What we offer
• A dynamic and collaborative research environment in artificial intelligence and robotics
• The opportunity to develop your own research ideas and work on cutting-edge projects
• Access to state-of-the-art lab facilities
• International research collaborations and conference travel opportunities
• Targeted career guidance for a successful academic and research career
The figure below illustrates an example application of the project, focusing on learning manipulation tasks with objects on a conveyor belt.
Requirements
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• For Ph.D. candidates: Master’s degree in Computer Science, Physics, Telematics, Statistics, Mathematics, Electrical Engineering, Mechanics, Robotics, or a related field
• For postdoctoral candidates: A completed Ph.D. in a topic related field
• Strong motivation for scientific research and publications
• Ability to work independently and collaboratively in an interdisciplinary team
• Interest in writing a PhD dissertation
Desired additional qualifications
• Programming experience in C, C++, C#, Java, MATLAB, Python, or a similar language
• Familiarity with AI libraries and frameworks (e.g., TensorFlow, PyTorch)
• Strong English communication skills (written and spoken)
• Willingness to travel for research collaborations and technical presentations
Application & Materials
A complete application includes:
1. Curriculum Vitae (CV) (detailed)
2. Letter of Motivation – State if you apply for the Ph.D. or the postdoc position
3. Master’s or Ph.D. Thesis (PDF or link)
4. Academic Certificates (Bachelor’s and Master’s degrees)
Optional but beneficial:
5. Letter(s) of Recommendation
6. Contact Information for References (name, email, phone)
7. Previous Publications (PDFs or links)
Application deadline: Open until the position is filled.
Online Application via Email: Please send your application files to rueckert@unileoben.ac.at
The Montanuniversität Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.