
Julia Schmelz


You have also required to fulfil 20 ECTS, they have to be split in main and secondary subject:
Privatissima (talking to your prof, SE type) for a maximum of 4 ECTS
There is no limit on IV courses
And you can also have stuff (eg. summer school) from other unis, however you have to go through the equality process (they will check if it really is equal to the ects here)
These stated in the curriculum, which is in German.
Example course:
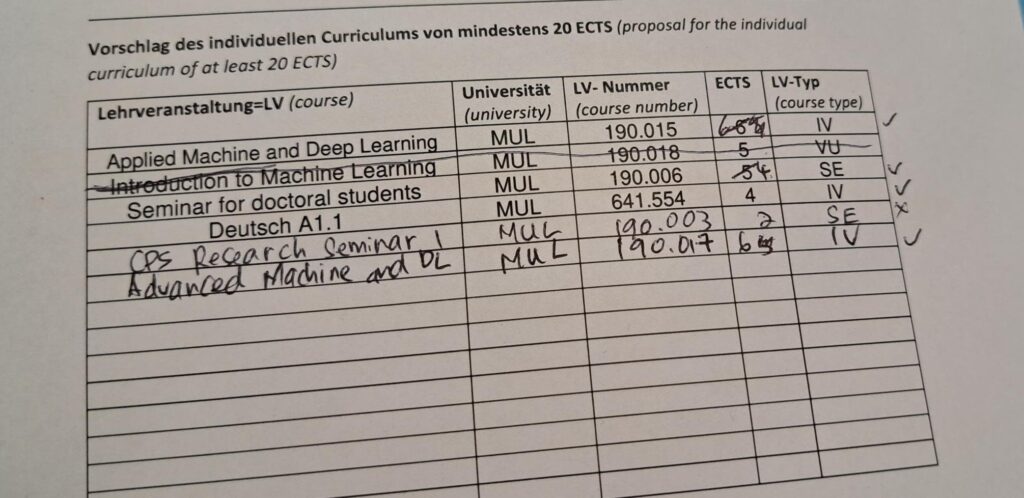
(This starts from 30 July 2024)
You are required to submit a comparative analysis of the prices for your trip along with other documents for claims.
Documents to submit and print in hard copy:
(This starts from 26 Jun 2024)
You can find the entry form at here: https://cloud.cps.unileoben.ac.at/index.php/s/GTFTrT8btK7mMtW
Published on 21 May 2024
Update 1 on 26 Jun 2024
Update 2 on 30 July 2024
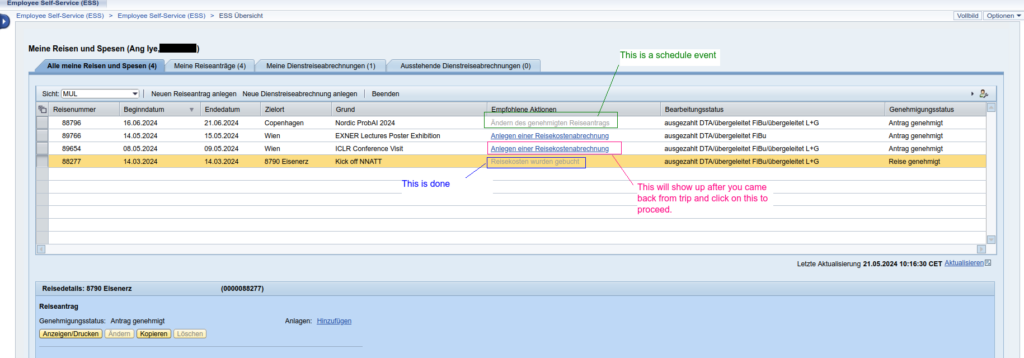
At your SAP, click on “Meine Reisen und Spesen”.
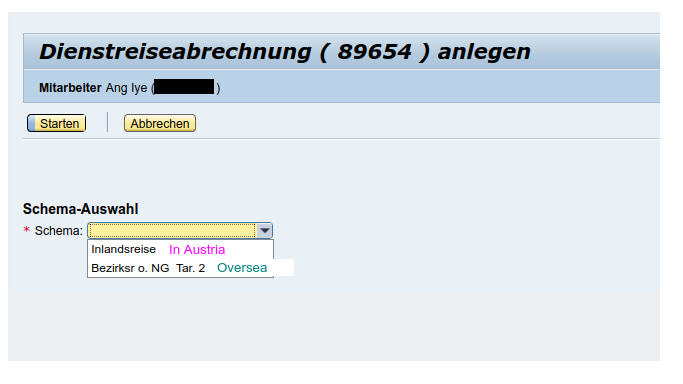
In my case, I will show example in Austria.
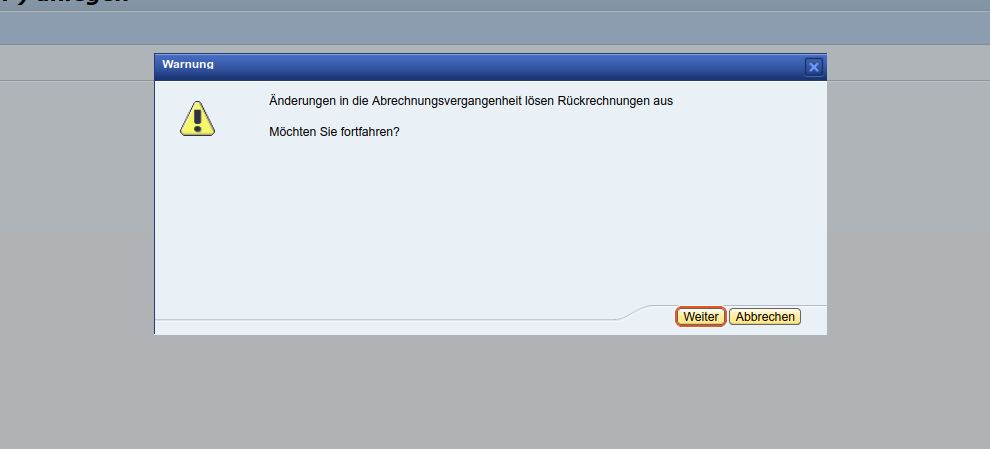
Click “Welter” to proceed.
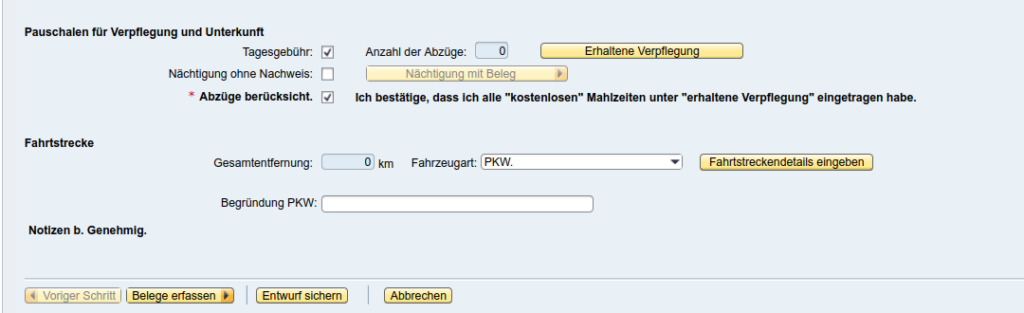
Step 1: Verify every information especially Kontierung (Your project number)

Next, click on checkbox with * and then proceed with “Belege erfassen”
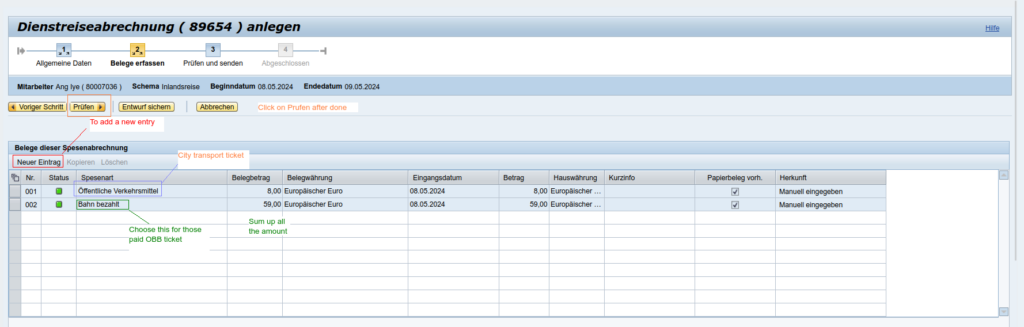
Step 2: Add all related claims
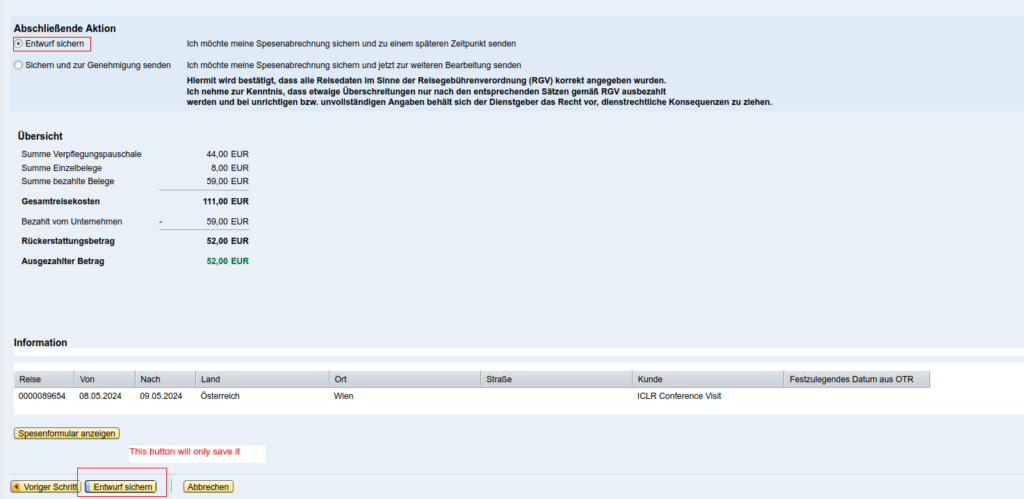
Step 3: Validate
There are two options: Save it for future or Sent it to financial department


{kind=link}