

Supervisors: Univ.-Prof. Dr Elmar Rückert, LUPA Electronics GmbH
Start date: ASAP from June 2022
Theoretical difficulty: high
Practical difficulty: low
Abstract
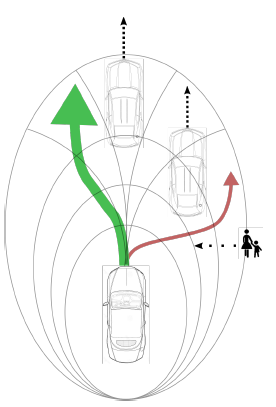
Wir Menschen sind in der Lage unter widrigen Bedingungen z.B. bei eingeschränkter Sicht, oder bei Störungen komplexe Vorgänge wahrzunehmen, vorherzusagen und innerhalb von wenigen Millisekunden zusammenhängende Entscheidungen zu treffen. Mit dem zunehmenden Grad der Automatisierung steigen auch die Anforderungen an künstliche Systeme. Immer komplexere und größere Datenmengen müssen verarbeitet werden um autonome Entscheidungen zu treffen. Mit gängigen KI Ansätzen stoßen wir aufgrund der konvergierenden Miniaturisierung an Grenzen, die z.B. im Bereich des autonomen Fahrens nicht ausreichen, um ein sicheres autonomes System zu entwickeln.
Ziel dieser Forschung ist es probabilistische Vorhersagemodelle in massiv parallelisierbaren neuronalen Netzen zu implementieren und mit diesen komplexe Entscheidungen Aufgrund erlernter interner Vorhersagemodelle zu treffen. Die neuronalen Modelle verarbeiten hoch dimensionale Daten moderner und innovativer taktiler und visueller Sensoren. Wir testen die neuronalen Vorhersage und Entscheidungsmodelle in humanoiden Roboteranwendungen in dynamischen Umgebungen.
Unser Ansatz beruht auf der Theorie der probabilistischen Informationsverarbeitung in neuronalen Netzen und unterscheidet sich somit grundlegend von den gängigen Methoden tiefer neuronaler Netze. Die zugrundeliegende Theorie ermöglicht weitreichende Modelleinblicke und erlaubt neben den Vorhersagen von Mittelwerten auch Unsicherheiten und Korrelationen. Diese zusätzlichen Vorhersagen sind entscheidend für verlässliche, erklärbare und robuste künstliche Systeme und sind eines der größten offenen Probleme in der künstlichen Intelligenz Forschung.
Tentative Work Plan
To achieve our aim, the following concrete tasks will be focused on:
- Literature research on graphical model inference of motion plans.
- Toy Task implementation in Python.
- Implementation of GMMs, PTSMs and combinations in Python.
- Visualization and analysis of the prediction performance. Definition of suitable evaluation criteria.
- (Optional) Implementation in a realistic driving simulator.
- Analysis and evaluation of the generated data.