

Digital Underground Mining: Sensorik, KI und IoT für Echtzeitüberwachung und Prozessoptimierung im Untertagebau (MineView)
Rohstoffe 2024 FFG Projekt 15/11/2025-14/11/2028 Ziel des Projekts MineView ist die Entwicklung eines digitalen Überwachungssystems, das letztendlich eine ganzheitliche und kontinuierliche gebirgsmechanische Zustandsbewertung von untertägigen…
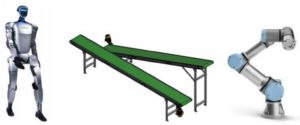
Humanoide Roboter und multimodale Manipulationstechnologien für die industrielle Produktion und Logistik (RoboWork)
Schlüsseltechnologien im produktionsnahen Umfeld 2025 FFG Projekt 08/2026-07/2029 Die primären Ziele des industriellen Forschungsprojekts RoboWork adressieren die Bereitstellung und Evaluierung humanoider robotischer Technologien in produktiven…
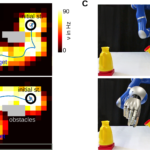
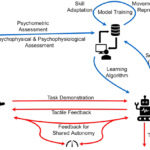
Multi-modale, taktil-visuelle Robotergreifsysteme für industrielle Anwendungen (MUTAVIA)
Schlüsseltechnologien im produktionsnahen Umfeld 2024 FFG Projekt 03/2025-02/2028 Unsere Forschung entwickelt intelligente Roboterhände, die fühlen können – ähnlich wie menschliche Hände. Mit innovativen Sensoren auf…
Nachhaltige Nutzung von Aushubmaterialien des Tief- & Tunnelbaus mithilfe sensorgestützter Technologien (NNATT)
FFG Projekt 01/03/2024-28/02/2027 Aushubmaterialien machen mit rund 42 Mio. t/a fast 60 % des österreichischen Abfallaufkommens aus, von denen 73 % deponiert und nur 8…
K1-MET P3.3 & P3.4
FFG K1-MET Project 07/2023-06/2026 P3.4: This project aims at employing advanced data analyses and methodology in order to investigate process data from different processes in…
KI basiertes Recycling von Metallverbund-Abfällen (KIRAMET)
FFG, BMVIT Leitprojekt 07/2023-06/2026 Die metallverarbeitende Industrie ist bei ihrer Produktion auf hochwertigen Metallschrott angewiesen. Derzeit muss dieser nach Österreich importiert werden. Mit Juli startet…
Innovationslabor für Automation, Robotik und KI
Projektpartner: Prof. Thomas Thurner, Lehrstuhl für Automation & Messtechnik Prof. Elmar Rückert, Lehrstuhl für Cyber-Physical-Systems Forschungsinnovationen sind die treibende Kraft für eine moderne nachhaltige Kreislaufwirtschaft.…
Autonomes Industrieroboterlabor der Zukunft (AI-Robot-Lab)
Ausstattung: 2 universal robotics UR3e Roboter, 2 FANUC CRX10iA Roboter eine Drehbank von ELMAG eine Industriebohrfräse von ELMAG und ein Rollenförderband. Die Anforderungen an Industriebetriebe…

Deep Reinforcement Learning for Navigation in Warehouses
Deep Reinforcement Learning (DRL) has demonstrated great success in learning single or multiple tasks from scratch. Various DRL algorithms have been proposed and were applied…

Robert-Bosch-Stiftung LEGO Robotic 07/2019-10/2021
Neuartige Robotertechnologien und künstliche Lernmethoden können Schlüsseltechnologien sein, um unsere Umwelt zu schützen. Prof. Dr. Elmar Rückert und Herr Ole Pein haben diese Seite ins Leben gerufen, um…
Neural and Probabilistic Robotics
Neural models have incredible learning and modeling capabilities which was demonstrated in complex robot learning tasks (e.g., Martin Riedmiller’s or Sergey Levine’s work). While these…

H2020 Goal-Robots 11/2016-10/2020
This project aims to develop a new paradigm to build open-ended learning robots called `Goal-based Open ended Autonomous Learning’ (GOAL). GOAL rests upon two key…

Dynamic Control of a CableBot
Building a CableBot and Learning the Dynamics Model and the Controller Controlling cable driven master slave robots is a challenging task. Fast and precise motion…

AI and Learning in Robotics
The challenges in understanding human motor control, in brain-machine interfaces and anthropomorphic robotics are currently converging. Modern anthropomorphic robots with their compliant actuators and various…
Active transfer learning with neural networks through human-robot interactions (TRAIN)
DFG Project 07/2020-01/2025 In our vision, autonomous robots are interacting with humans at industrial sites, in health care, or at our homes managing the household.…