@conference{Rueckert2015b,
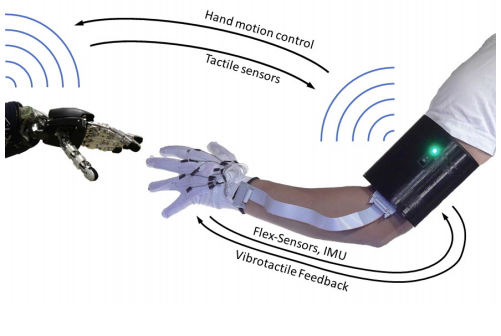
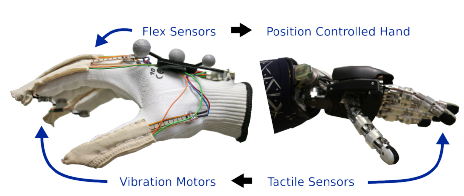
title = {Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations},
author = {Elmar Rueckert and Rudolf Lioutikov and Roberto Calandra and Marius Schmidt and Philipp Beckerle and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckertb.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_Arduino_SensorGlove_2015Rueckert.zip, MATLAB Code (JAVA Interface), ARDUINO Firmware
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SensorGloveMexInterface_2015Rueckert.zip, MATLAB Code (MEX-Function Demo Interface)},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
booktitle = {ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots},
crossref = {p10831},
key = {codyco},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}