The Chair of Cyber-Physical Systems at the Technical University Leoben, led by Prof. Dr. Elmar Rueckert, conducts research at the intersection of artificial intelligence and autonomous systems.
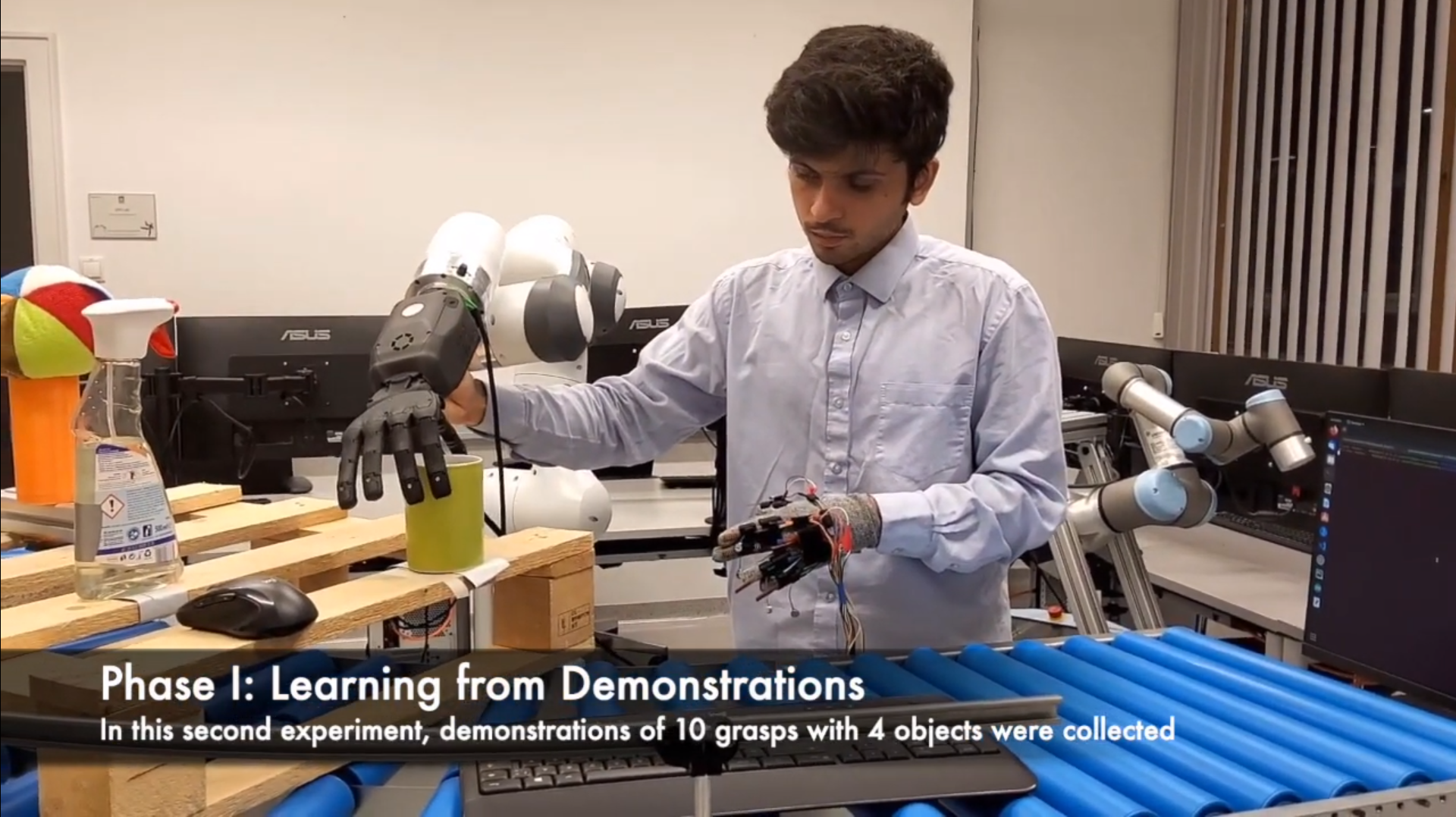
Our work focuses on developing foundation models for robotics and exploring robot skill learning, including dexterous and visual–tactile manipulation, reinforcement learning, self-supervised,active / interactive, and intrinsically motivated learning. We are particularly interested in inference and reasoning mechanisms that enable robots to generalize and adapt across complex environments.
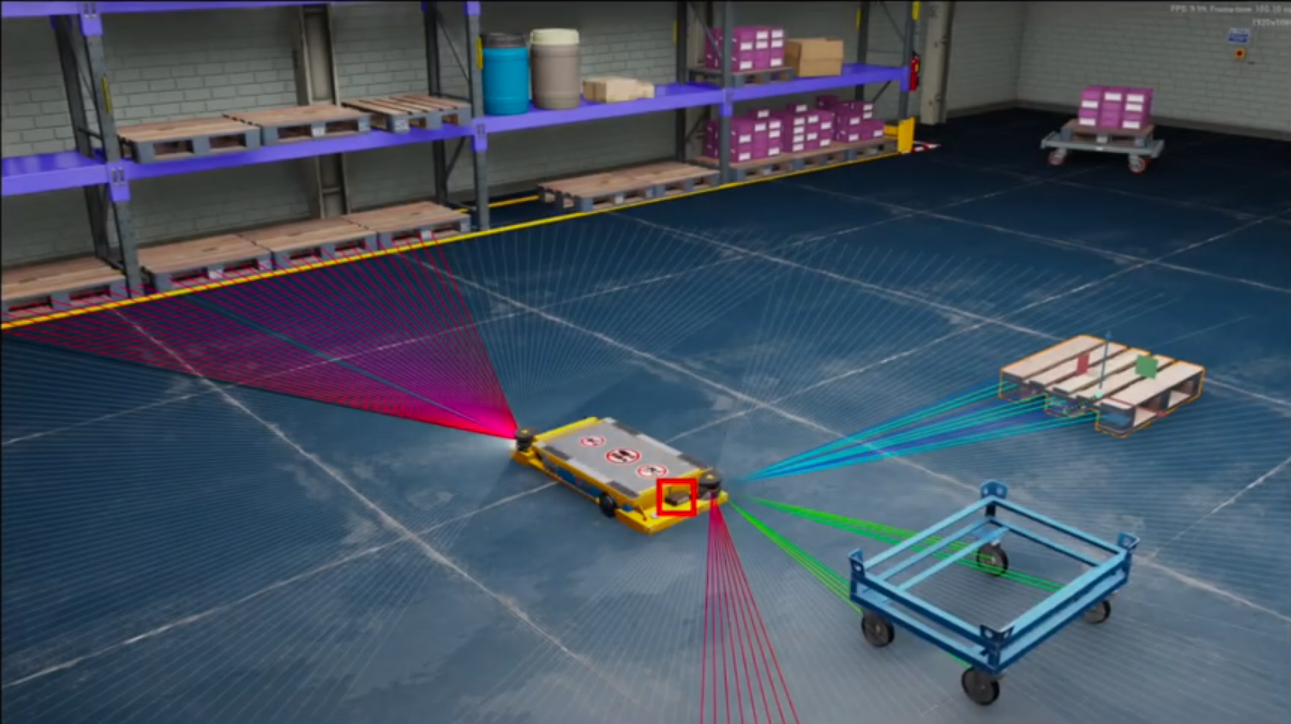
Application domains include humanoid robotics and autonomous systems for real-world tasks,industrial production, recycling, and mining, where our goal is to advance safety, efficiency, and sustainability through intelligent, adaptable robotic solutions.
Rottmann, N; Bruder, R; Schweikard, A; Rueckert, E. (2019). Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors, Proceedings of the International Conference on Bio-inspired Systems and…Read More
Daniel Tanneberg, Jan Peters, Elmar Rueckert Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks accepted (Oct, 9th 2018) at Neural Networks – Elsevier with an Impact Factor…Read More
Gondaliya, D. Kaushikkumar; Peters, J.; Rueckert, E. (2018). Learning to categorize bug reports with LSTM networks: An empirical study on thousands of real bug reports from a world leading software…Read More
Adrian Šošić, Elmar Rueckert, Jan Peters, Abdelhak M. Zoubir, Heinz Koeppl Inverse Reinforcement Learning via Nonparametric Spatio-Temporal Subgoal Modeling accepted (Oct, 8th 2018) at Journal of Machine Learning Research (JMLR).
Rueckert, E.; Nakatenus, M.; Tosatto, S.; Peters, J. (2017). Learning Inverse Dynamics Models in O(n) time with LSTM networks. Tanneberg, D.; Peters, J.; Rueckert, E. (2017). Efficient Online Adaptation with…Read More
Tanneberg, D.; Peters, J.; Rueckert, E. (2017). Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals, Proceedings of the Conference on Robot Learning (CoRL).
Title: Neural models for robot motor skill learning. Abstract: The challenges in understanding human motor control, in brain-machine interfaces and anthropomorphic robotics are currently converging. Modern anthropomorphic robots with their compliant…Read More
Learning to Plan through Reinforcement Learning in Spiking Neural Networks Abstract: Movement planing is a fundamental skill that is involved in many human motor control tasks. While the hippocampus plays a…Read More
Rueckert, Elmar; Camernik, Jernej; Peters, Jan; Babic, Jan Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control Nature Publishing Group: Scientific Reports, 6 (28455), 2016.