

Publication List with Images
2024 |
|
Dave, Vedant; Rueckert, Elmar Denoised Predictive Imagination: An Information-theoretic approach for learning World Models Conference European Workshop on Reinforcement Learning (EWRL), 2024. Abstract | Links | BibTeX | Tags: computer vision, Contrastive Learning, Reinforcement Learning, Representation Learning @conference{dpidave2024,Humans excel at isolating relevant information from noisy data to predict the behavior of dynamic systems, effectively disregarding non-informative, temporally-correlated noise. In contrast, existing reinforcement learning algorithms face challenges in generating noise-free predictions within high-dimensional, noise-saturated environments, especially when trained on world models featuring realistic background noise extracted from natural video streams. We propose a novel information-theoretic approach that learn world models based on minimising the past information and retaining maximal information about the future, aiming at simultaneously learning control policies and at producing denoised predictions. Utilizing Soft Actor-Critic agents augmented with an information-theoretic auxiliary loss, we validate our method's effectiveness on complex variants of the standard DeepMind Control Suite tasks, where natural videos filled with intricate and task-irrelevant information serve as a background. Experimental results demonstrate that our model outperforms nine state-of-the-art approaches in various settings where natural videos serve as dynamic background noise. Our analysis also reveals that all these methods encounter challenges in more complex environments. |  |
Neubauer, Melanie; Rueckert, Elmar Semi-Autonomous Fast Object Segmentation and Tracking Tool for Industrial Applications Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. Links | BibTeX | Tags: computer vision, Deep Learning, Recycling @inproceedings{neubauer2024fost, | 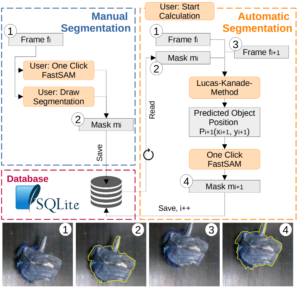 |
Compact List without Images
Conferences |
Dave, Vedant; Rueckert, Elmar Denoised Predictive Imagination: An Information-theoretic approach for learning World Models Conference European Workshop on Reinforcement Learning (EWRL), 2024. @conference{dpidave2024,Humans excel at isolating relevant information from noisy data to predict the behavior of dynamic systems, effectively disregarding non-informative, temporally-correlated noise. In contrast, existing reinforcement learning algorithms face challenges in generating noise-free predictions within high-dimensional, noise-saturated environments, especially when trained on world models featuring realistic background noise extracted from natural video streams. We propose a novel information-theoretic approach that learn world models based on minimising the past information and retaining maximal information about the future, aiming at simultaneously learning control policies and at producing denoised predictions. Utilizing Soft Actor-Critic agents augmented with an information-theoretic auxiliary loss, we validate our method's effectiveness on complex variants of the standard DeepMind Control Suite tasks, where natural videos filled with intricate and task-irrelevant information serve as a background. Experimental results demonstrate that our model outperforms nine state-of-the-art approaches in various settings where natural videos serve as dynamic background noise. Our analysis also reveals that all these methods encounter challenges in more complex environments. |
Proceedings Articles |
Neubauer, Melanie; Rueckert, Elmar Semi-Autonomous Fast Object Segmentation and Tracking Tool for Industrial Applications Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{neubauer2024fost, |