

Publication List with Images
2021 |
|
A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. |  |
2020 |
|
Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors Proceedings Article In: IEEE SENSORS , pp. 1–4, 2020. | 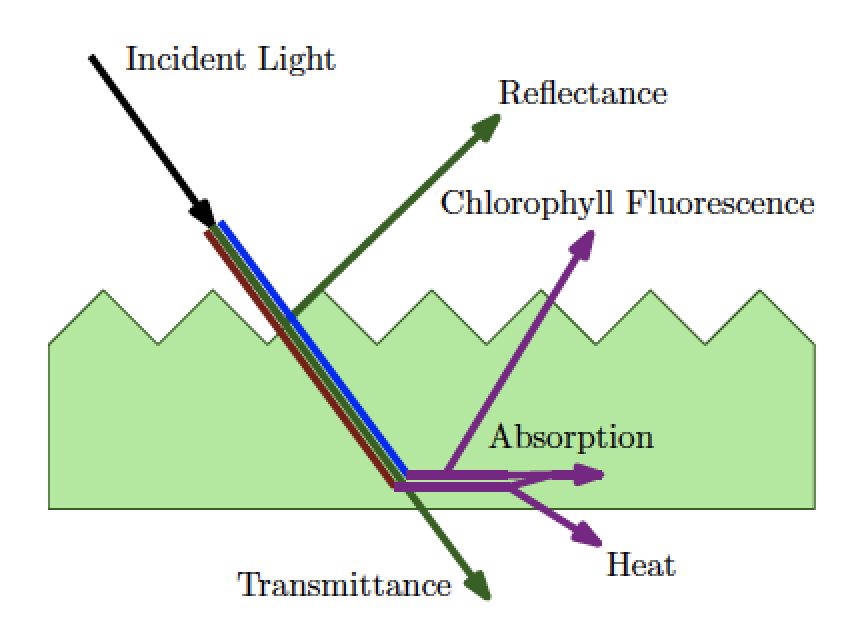 |
Compact List without Images
Proceedings Articles |
A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. |
Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors Proceedings Article In: IEEE SENSORS , pp. 1–4, 2020. |