2020
|
Akbulut, M Tuluhan; Oztop, Erhan; Seker, M Yunus; Xue, Honghu; Tekden, Ahmet E; Ugur, Emre ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing Proceedings Article In: 2020. @inproceedings{nokey,
title = {ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing},
author = {M Tuluhan Akbulut and Erhan Oztop and M Yunus Seker and Honghu Xue and Ahmet E Tekden and Emre Ugur},
url = {https://cps.unileoben.ac.at/wp/CoRL2020Akbulut.pdf},
year = {2020},
date = {2020-11-20},
urldate = {2020-11-20},
abstract = {To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions.},
keywords = {Deep Learning, movement primitives, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions. |  |
2019
|
Stark, Svenja; Peters, Jan; Rueckert, Elmar Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. @inproceedings{Stark2019,
title = {Experience Reuse with Probabilistic Movement Primitives},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2019Stark.pdf, Article File},
year = {2019},
date = {2019-11-03},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019.},
keywords = {movement primitives, Reinforcement Learning, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2017
|
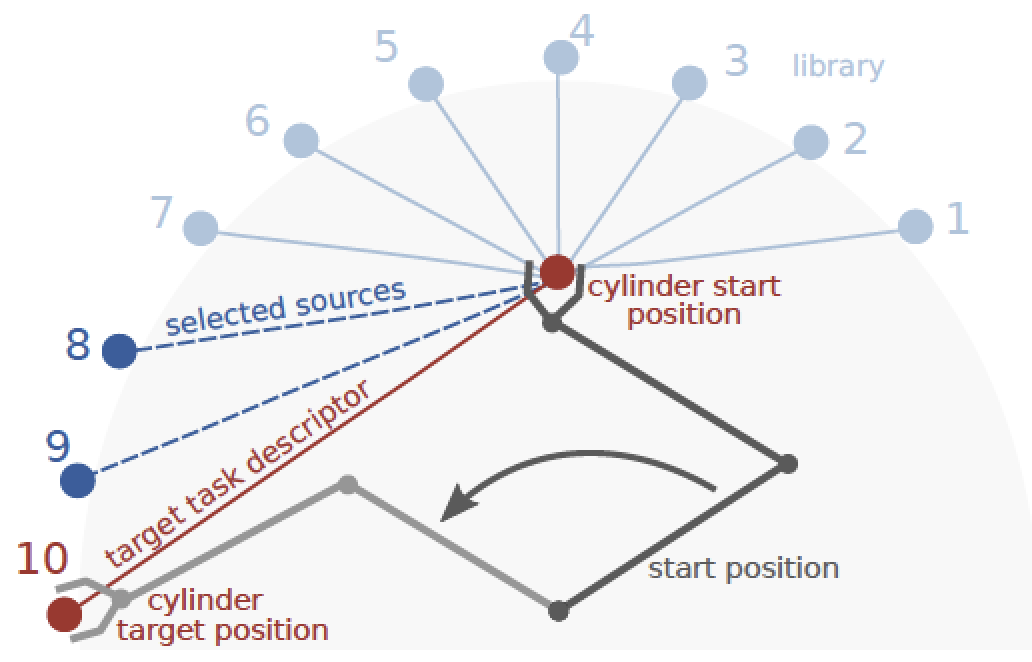
Stark, Svenja; Peters, Jan; Rueckert, Elmar A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Humanoids2017Stark,
title = {A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Stark.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11093},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2015
|
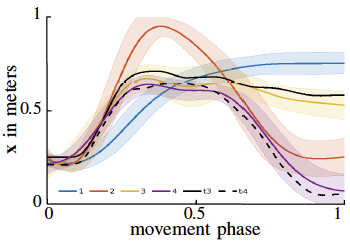
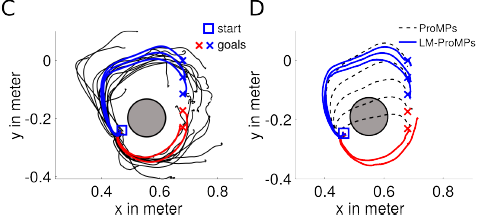
Rueckert, Elmar; Mundo, Jan; Paraschos, Alexandros; Peters, Jan; Neumann, Gerhard Extracting Low-Dimensional Control Variables for Movement Primitives Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. @inproceedings{Rueckert2015,
title = {Extracting Low-Dimensional Control Variables for Movement Primitives},
author = {Elmar Rueckert and Jan Mundo and Alexandros Paraschos and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckert.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LatentManifoldPrimitives_2015Rueckert.zip, MATALB Code
https://cps.unileoben.ac.at/wp/resources/videos/KUKA_LatentManifold_ProMPs_REAL_Elmar.mp4, Supplementary Video},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10796},
key = {3rdhand, codyco},
keywords = {movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
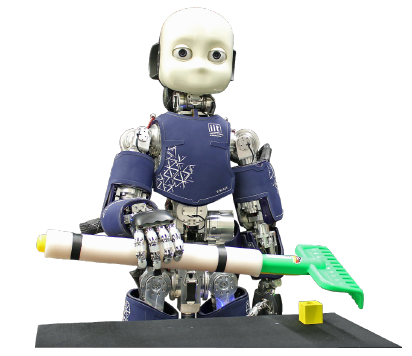
Paraschos, Alexandros; Rueckert, Elmar; Peters, Jan; Neumann, Gerhard Model-Free Probabilistic Movement Primitives for Physical Interaction Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2015. @inproceedings{Paraschos2015,
title = {Model-Free Probabilistic Movement Primitives for Physical Interaction},
author = {Alexandros Paraschos and Elmar Rueckert and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/IROS2015Paraschos.pdf, Article File},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS)},
crossref = {p10832},
key = {codyco},
keywords = {inverse dynamics, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

