2019 |
|
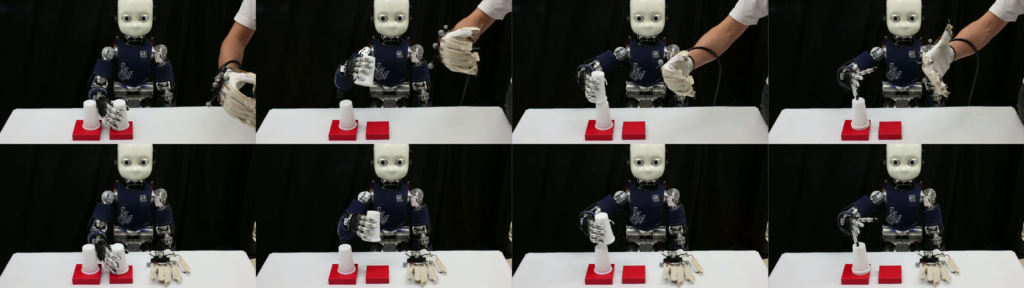
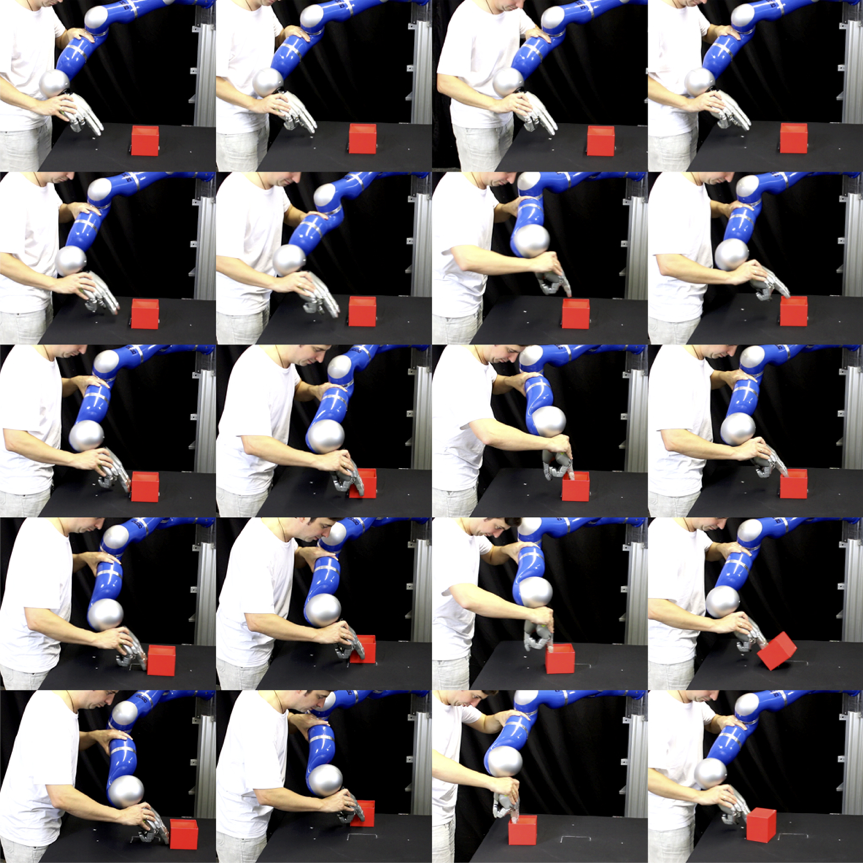
Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks Journal Article In: Neural Networks – Elsevier, vol. 109, pp. 67-80, 2019, ISBN: 0893-6080, (Impact Factor of 7.197 (2017)). | 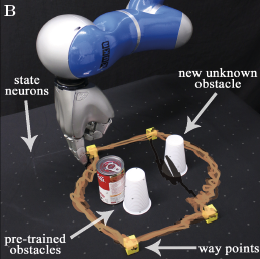 |
2017 |
|
Efficient Online Adaptation with Stochastic Recurrent Neural Networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. | 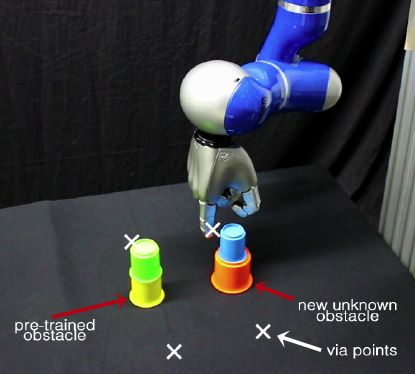 |
Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals Proceedings Article In: Proceedings of the Conference on Robot Learning (CoRL), 2017. | 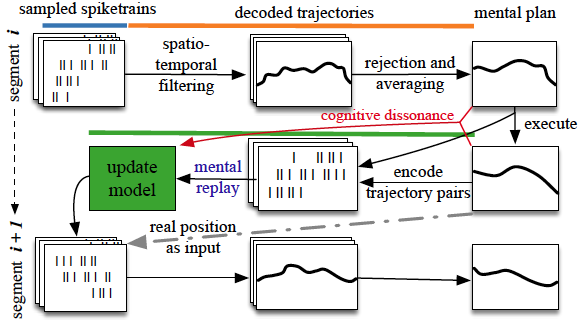 |
Author: Elmar Rueckert



Robot How to Build a USB Controlled Treadmill
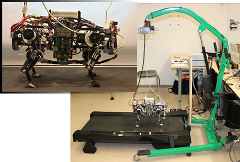
- Pololu Jrk 21v3 USB Motor Controller with Feedback or stronger (max. 28V, 3A)

- Comes with a Windows Gui to specify the control gains
- Sharp distance sensor GP2Y0A21, 10 cm – 80 cm or similar
- USB cable
- Cable for the distance sensor
- Power cables for the treadmill
- Controller User Guide by Polo

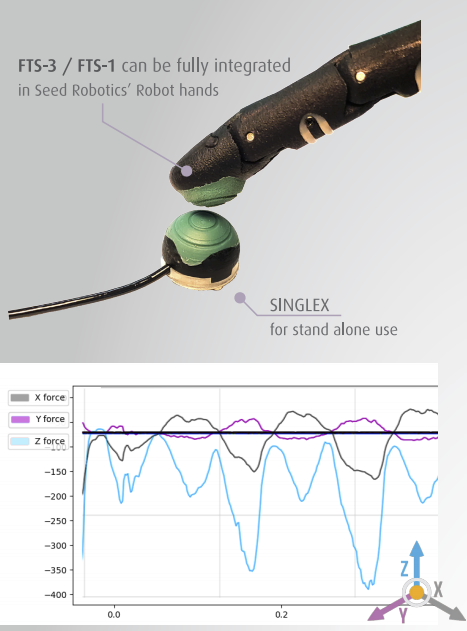
Robot Hand RH8 with 19DoF

2020 |
|
Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. |  |
GitHub FRANKA EMIKA Panda, ROS

2020 |
|
Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. | |
Robot FRANKA EMIKA Panda
2020 |
|
Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. | |