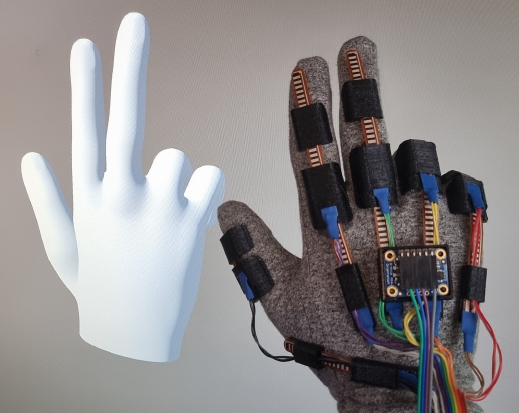
Sensor gloves are gaining importance in tracking hand and finger movements in virtual reality applications as well as in scientific research. In this project, we developed a low-budget, yet accurate sensor glove system that uses flex sensors for fast and efficient motion tracking.
The contributions are ROS Interfaces, simulation models as well as motion modeling approaches.
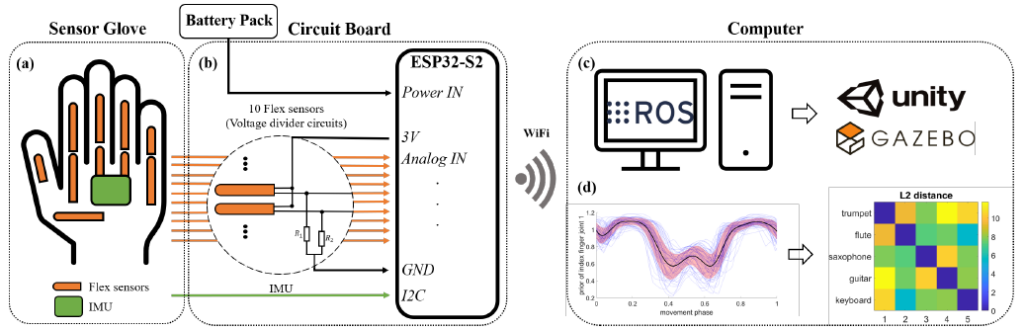
The figure shows a simplified schematic diagram of the system architecture for our sensor glove design:
(a) Glove layout with sensor placements, the orange fields denote the flex sensors, while the IMU is marked as a green rectangle,
(b) Circuit board which is wired with the sensor glove, has 10 voltage dividers for reading each flex sensor connected to ADC pins of the microcontoller ESP32-S2 and the IMU is connected to I2C pins,
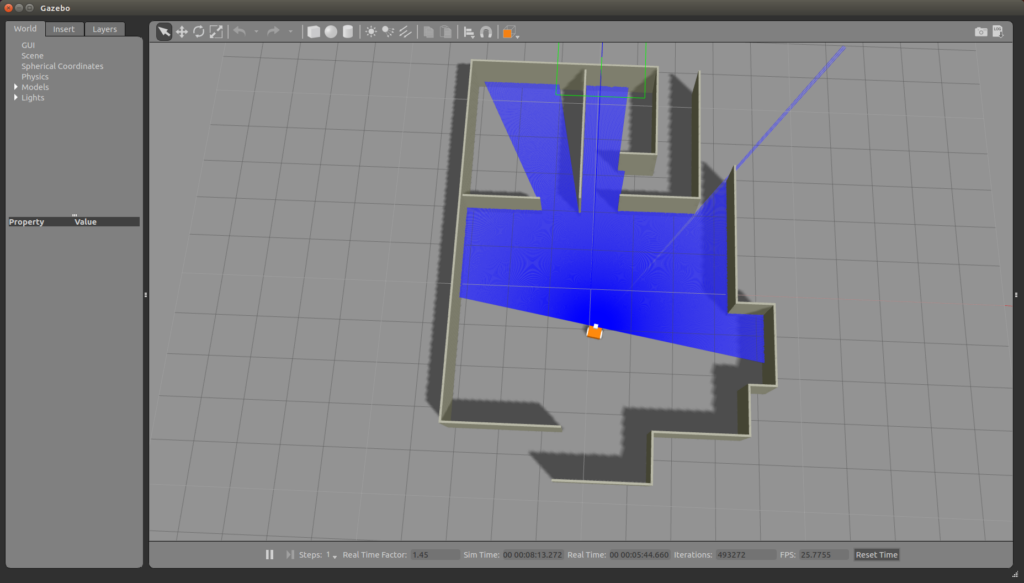
(c) The ESP32-S2 sends the raw data via WiFi as ROS messages to the computer, which allows a real-time visualization in Unity or Gazebo,
(d) Post-processing of the recorded data, e.g. learning probabilistic movement models and searching for similarities.
Publications
A research publication by Robin Denz, Rabia Demirci, M. Ege Cansev, Adna Bliek, Philipp Beckerle, Elmar Rueckertand Nils Rottmann is currently under review.
Univ.-Prof. Dr. Elmar Rueckert is organizing this research seminar. Topics include research in AI, machine and deep learning, robotics, cyber-physical-systems and process informatics.
Language: English only
Are you an undergraduate, graduate, or doctoral student and want to learn more about AI?
This course will give you the opportunity to listen to research presentations of latest achievements. The target audience are non-experts. Thus no prior knowledge in AI is required.
To get the ECTS credits, you will select a research paper, read it and present it within the research seminar (10-15 min presentation). Instead of selecting a paper of our list, you can also suggest a paper. This suggestion has to be discussed with Univ.-Prof. Dr. Elmar Rueckert first.
After the presentation, the paper is discussed for 10-15 min.
Further, external presenters that are leading researchers in AI will be invited. External speakers will present their research in 30-45 min, followed by a 15 min discussion.
Univ.-Prof. Dr. Elmar Rueckert was teaching this course at the University of Luebeck in the winter semester in 2018.
Language: English only
Course Details
[WS2018/19] In the winter semester, I will teach a course on Probabilistic Learning for Robotics which covers advanced topics including graphical models, factor graphs, probabilistic inference for decision making and planning, and computational models for inference in neuroscience. The lecture will take place in the Seminarraum Informatik 5 (Von Neumann) 2.132 from 12.00 – 14.00 on selected Thursdays.
In accompanying exercises and hands on tutorials the students will experiment with state of the art machine learning methods and robotic simulation tools. In particular, Mathworks’ MATLAB, the robot middleware ROS and the simulation tool V-Rep will be used. The exercises and tutorials will also take place in the seminar room 2.132 on selected Fridays (see the course materials and dates below).
Univ.-Prof. Dr. Elmar Rueckert was teaching this course at the University of Luebeck in 2018, 2019 and 2020.
Language: English only
Course Details
In this research seminar we discuss state of the art research topics in robotics, machine learning and autonomous systems. Presenters are invited guest speakers, researcher, and graduate and under graduate students.
Some remarks on the UzL Module idea: The lecture Probabilistic Machine Learning belongs to the Module Robot Learning (RO4100). In the winter semester, Prof. Dr. Elmar Rueckert is teaching the course Probabilistic Machine Learning (RO5101 T). In the summer semester, Prof. Dr. Elmar Rueckert is teaching the course Reinforcement Learning (RO5102 T). Important: Due to the study regulations, students have to attend both lectures to receive a final grade. Thus, there will be only a single written exam for both lectures. You can register for the written exam at the end of a semester.
Important dates
Written exam: 04. February 2021 (2nd appointment 04.03.2021)
Assignment I: Freitag, 11. Dezember 2020, 23:00
Assignment II: Freitag, 22. Januar 2021, 23:00
The course topics are
Introduction to Probability Theory (Statistics refresher, Bayes Theorem, Common Probability distributions, Gaussian Calculus).
Linear Probabilistic Regression (Linear models, Maximum Likelihood, Bayes & Logistic Regression).
Nonlinear Probabilistic Regression (Radial basis function networks, Gaussian Processes, Recent research results in Robotic Movement Primitives, Hierarchical Bayesian & Mixture Models).
Probabilistic Inference for Filtering, Smoothing and Planning (Classic, Extended & Unscented Kalman Filters, Particle Filters, Gibbs Sampling, Recent research results in Neural Planning).
Q & A Session on Mondays ,12:15-13:45, virtual using the WEBEX room of Nils Rottmann. The session will be closed if no questions where asked till 12:20.
Interactive Online Lectures
In the lecture, Prof. Rueckert is using a self made lightboard to ensure an interactive and professional teaching environment. Have a look at the post on how to build such a lightboard. Here is an example recording.
Requirements
Strong statistical and mathematical knowledge is required beforehand. It is highly recommended to attend the course Humanoid Robotics (RO5300) prior to attending this course. The students will also experiment with state-of-the-art machine learning methods and robotic simulation tools which require strong programming skills.
Grading
The course is accompanied by twowritten assignments. Both assignments have to be passed as requirement to attend the written exam. Details will be presented in the first course unit on October the 22nd, 2020.
Materials for the Exercise
The course is accompanied by three graded assignments on Probabilistic Regression, Probabilistic Inference and on Probabilistic Optimization. The assignments will include algorithmic implementations in Matlab, Python or C++ and will be presented during the exercise sessions. The Robot Operating System (ROS) will also be part in some assignments as well as the simulation environment Gazebo. To experiment with state-of-the-art robot control and learning methods Mathworks’ MATLAB will be used. If you do not have it installed yet, please follow the instructions of our IT-Service Center.
Literature
Daphne Koller, Nir Friedman. Probabilistic Graphical Models: Principles and Techniques. ISBN 978-0-262-01319-2
Christopher M. Bishop. Pattern Recognition and Machine Learning. Springer (2006). ISBN 978-0-387-31073-2.
David Barber. Bayesian Reasoning and Machine Learning, Cambridge University Press (2012). ISBN 978-0-521-51814-7.
Kevin P. Murphy. Machine Learning: A Probabilistic Perspective. ISBN 978-0-262-01802-9
The lecture Reinforcement Learning belongs to the Module Robot Learning (RO4100).
In the winter semester, Prof. Dr. Elmar Rueckert is teaching the course Probabilistic Machine Learning – PML (RO5101 T).
In the summer semester, Prof. Dr. Elmar Rueckert is teaching the course Reinforcement Learning – RL (RO4100 T).
Important Remarks
Students will receive a single grade for the Module Robot Learning (RO4100) based on the average grade of PML and RL (rounded down in favor of the students).
This course is organized through online lectures and exercises. Details to the organizations will be discussed in our
FIRST MEETING: 17.04.2020 12:15-13:45
using the WEBEX tool. Please follow the instructions of the ITSC here to setup your computer. Click on the links to create a google calendar event, joint the WEBEX meeting or to access the online slides.
Dates & Times of the Online Webex Meetings
Lectures are organized on FRIDAYS, 12:15-13:45, WEBEX Link
Exercises are organized on THURSDAYS, 09:15-10:00, WEBEX Link
Course description
Introduction to Robotics and Reinforcement Learning (Refresher on Robotics, kinematics, model learning and learning feedback control strategies).
Foundations of Decision Making (Reward Hypothesis, Markov Property, Markov Reward Process, Value Iteration, Markov Decision Process, Policy Iteration, Bellman Equation, Link to Optimal Control).
Principles of Reinforcement Learning (Exploration and Exploitation strategies, On & Off-policy learning, model-free and model-based policy learning, Algorithmic principles: Q-Learning, SARSA, (Multi-step) TD-Learning, Eligibility Traces).
Deep Reinforcement Learning (Introduction to Deep Networks, Stochastic Gradient Descent, Function Approximation, Fitted Q-Iteration, (Double) Deep Q-Learning, Policy-Gradient approaches, Recent research results in Stochastic Deep Neural Networks).
The learning objectives / qualifications are
Students get a comprehensive understanding of basic decision making theories, assumptions and methods.
Students learn to analyze the challenges in a reinforcement learning application and to identify promising learning approaches.
Students will understand the difference between deterministic and probabilistic policies and can define underlying assumptions and requirements for learning them.
Students understand and can apply advanced policy gradient methods to real world problems.
Students know how to analyze the learning results and improve the policy learner parameters.
Students understand how the basic concepts are used in current state of the art research in robot reinforcement learning and in deep neural networks.
Basic knowledge in Machine Learning and Neural Networks is required. It is highly recommended to attend any of (but not restricted to) the following courses Probabilistic Machine Learning (RO 5101 T), Artificial Intelligence II (CS 5204 T), Machine Learning (CS 5450), Medical Deep Learning (CS 4374) prior to attending this course. The students will also experiment with state-of-the-art Reinforcement Learning (RL) methods on benchmark RL simulator (OpenAI Gym, Pybullet), which requires strong Python programming skills and knowledge on Pytorch is preferred. All assignment related materials have been tested on a windows machine (Win10 platform).
Grading
The course grades will be computed solely from submitted student reports of six assignments. The reports and the code have to be submitted (one report per team) to xue@rob.uni-luebeck.de. Please note the list of dates and deadlines below. Each assignment has minimally two-week deadline, some of them are of longer duration. Please use Latex for writing your report.
Bonus Points
tudents can get Bonus Points (BP) during the lectures when all quiz questions are correctly answered (1 BP per lecture). In the assignments, BPs will be given to the students when optional (and often also challenging) tasks are implemented and discussed.
Materials for the Exercise
The course is accompanied by pieces of course work on policy search for discrete state and action spaces (grid world example), policy learning in continuous spaces using function approximations and policy gradient methods in challenging simulated robotic tasks. The theoretical assignment questions are based on the lecture and also on the first three literature sources listed above. It is strongly recommended to read (or watch) these material in parallel to attending lecture. The assignments will include both written tasks and algorithmic implementations in Python. The tasks will be presented during the exercise sessions. As simulation environment, the OpenAI Gym platform will be used in the project works.
Literature
Richard S. Sutton, Andrew Barto: Reinforcement Learning: An Introductionsecond edition. The MIT Press Cambridge, Massachusetts London, England, 2018. Link to the online book (PDF)
Csaba Szepesvri: Algorithms for Reinforcement Learning. Morgan & Claypool in July 2010.
B. Siciliano, L. Sciavicco: Robotics: Modelling,Planning and Control, Springer, 2009.
Puterman, Martin L. Markov decision processes: discrete stochastic dynamic programming. John Wiley & Sons, 2014.
Szepesvari, Csaba. Algorithms for reinforcement learning (synthesis lectures on artificial intelligence and machine learning). Morgan and Claypool (2010).