@inproceedings{neubauer2024fost,
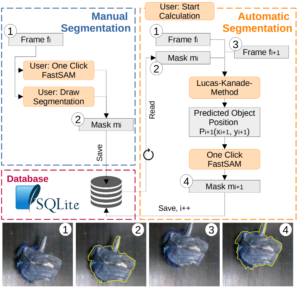
title = {Semi-Autonomous Fast Object Segmentation and Tracking Tool for Industrial Applications},
author = {Melanie Neubauer and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/6fTmgDZRQfDHfmg},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}





![IMG_E2067[1]](https://cps.unileoben.ac.at/wp/elementor/thumbs/IMG_E20671-scaled-q0nqf19dagb7p80bxmc1qp0zeqfsag8fuwe34qco94.jpg "IMG_E2067[1]")