


2019 |
|
Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. | 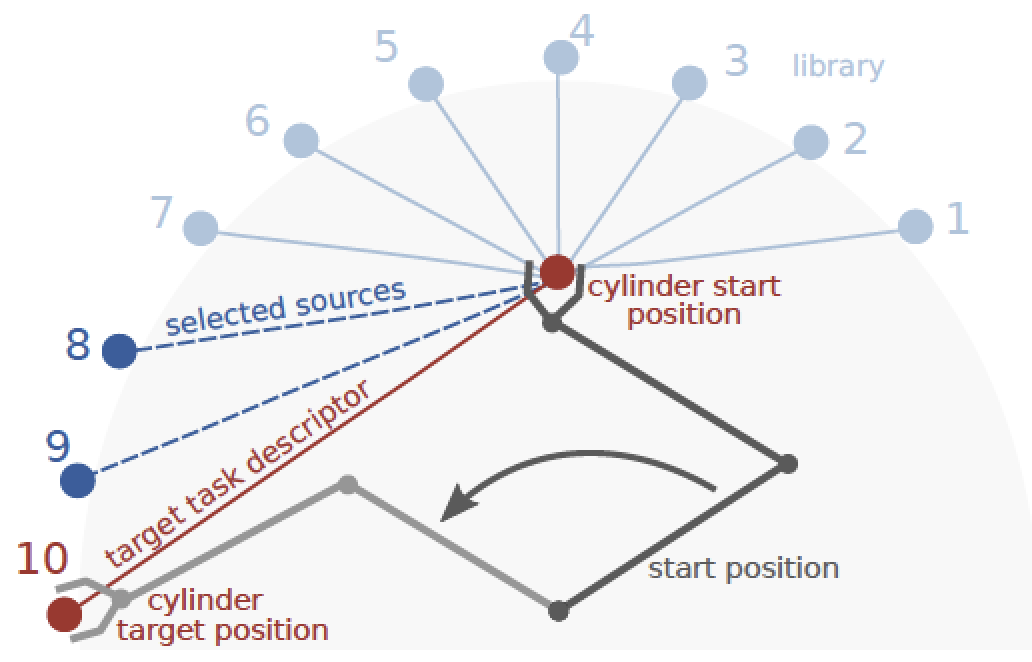 |
2017 |
|
A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. | 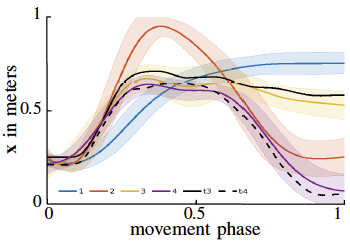 |
Simulation of the underactuated Sake Robotics Gripper in V-REP Conference Workshop at the International Conference on Humanoid Robots (HUMANOIDS), 2017. | 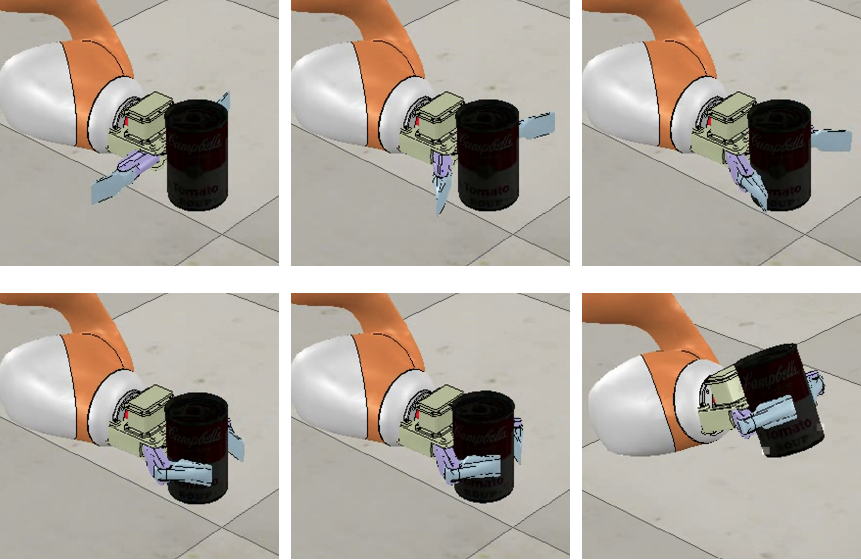 |