2021
|
Denz, R.; Demirci, R.; Cansev, E.; Bliek, A.; Beckerle, P.; Rueckert, E.; Rottmann, N. A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. @inproceedings{Denz2021,
title = {A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning},
author = {R. Denz and R. Demirci and E. Cansev and A. Bliek and P. Beckerle and E. Rueckert and N. Rottmann},
url = {https://cps.unileoben.ac.at/wp/ICAR2021Denz.pdf, Article File},
year = {2021},
date = {2021-12-06},
booktitle = {International Conference on Advanced Robotics },
pages = {7},
keywords = {Grasping, human motor control, Manipulation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
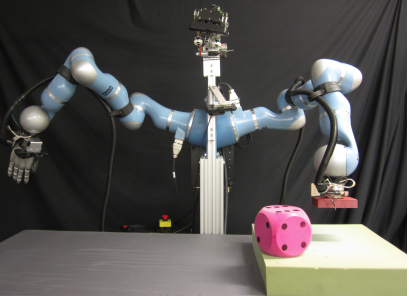
Azad, Morteza; Ortenzi, Valerio; Lin, Hsiu-Chin; Rueckert, Elmar; Mistry, Michael Model Estimation and Control of Complaint Contact Normal Force Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{Humanoids2016Azad,
title = {Model Estimation and Control of Complaint Contact Normal Force},
author = {Morteza Azad and Valerio Ortenzi and Hsiu-Chin Lin and Elmar Rueckert and Michael Mistry},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Azad.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LocallyWeightedRegression_MEX_2015Rueckert.zip, MATLAB Code (fast LWR MEX-Function Implementation)},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10986},
key = {codyco},
keywords = {constraint optimization, human motor control, inverse dynamics, model learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
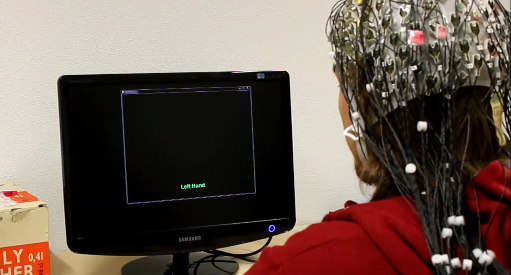
Sharma, David; Tanneberg, Daniel; Grosse-Wentrup, Moritz; Peters, Jan; Rueckert, Elmar Adaptive Training Strategies for BCIs Proceedings Article In: Cybathlon Symposium, 2016. @inproceedings{Sharma2016,
title = {Adaptive Training Strategies for BCIs},
author = {David Sharma and Daniel Tanneberg and Moritz Grosse-Wentrup and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Cybathlon2016Sharma.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Cybathlon Symposium},
crossref = {p10952},
keywords = {human motor control, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

