2018
|
Paraschos, Alexandros; Rueckert, Elmar; Peters, Jan; Neumann, Gerhard Probabilistic Movement Primitives under Unknown System Dynamics Journal Article In: Advanced Robotics (ARJ), vol. 32, no. 6, pp. 297-310, 2018. @article{Paraschos2018,
title = {Probabilistic Movement Primitives under Unknown System Dynamics},
author = {Alexandros Paraschos and Elmar Rueckert and Jan Peters and Gerhard Neumann },
url = {https://cps.unileoben.ac.at/wp/AR2018Paraschos.pdf, Article File},
doi = {10.1080/01691864.2018.1437674},
year = {2018},
date = {2018-01-10},
journal = {Advanced Robotics (ARJ)},
volume = {32},
number = {6},
pages = {297-310},
keywords = {inverse dynamics, model learning, movement primitives},
pubstate = {published},
tppubtype = {article}
}
|  |
2017
|
Rueckert, Elmar; Nakatenus, Moritz; Tosatto, Samuele; Peters, Jan Learning Inverse Dynamics Models in O(n) time with LSTM networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Humanoids2017Rueckert,
title = {Learning Inverse Dynamics Models in O(n) time with LSTM networks},
author = {Elmar Rueckert and Moritz Nakatenus and Samuele Tosatto and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Rueckert.pdf, Article File
https://cloud.cps.unileoben.ac.at/index.php/s/Pbny3MHBSaPKQA4, Dataset},
year = {2017},
date = {2017-11-15},
urldate = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11091},
key = {goal-robots, skills4robots},
keywords = {inverse dynamics, model learning, RNN},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
Tanneberg, Daniel; Paraschos, Alexandros; Peters, Jan; Rueckert, Elmar Deep Spiking Networks for Model-based Planning in Humanoids Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{tanneberg_humanoids16,
title = {Deep Spiking Networks for Model-based Planning in Humanoids},
author = {Daniel Tanneberg and Alexandros Paraschos and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Tanneberg.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/videos/humanoids_slower_540p.mp4, Supplementary Video},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10980},
key = {codyco and tacman},
keywords = {model learning, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
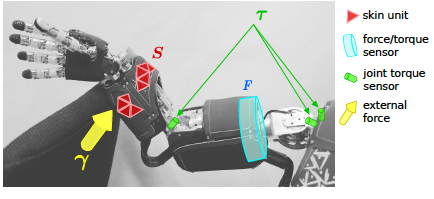
Azad, Morteza; Ortenzi, Valerio; Lin, Hsiu-Chin; Rueckert, Elmar; Mistry, Michael Model Estimation and Control of Complaint Contact Normal Force Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{Humanoids2016Azad,
title = {Model Estimation and Control of Complaint Contact Normal Force},
author = {Morteza Azad and Valerio Ortenzi and Hsiu-Chin Lin and Elmar Rueckert and Michael Mistry},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Azad.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LocallyWeightedRegression_MEX_2015Rueckert.zip, MATLAB Code (fast LWR MEX-Function Implementation)},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10986},
key = {codyco},
keywords = {constraint optimization, human motor control, inverse dynamics, model learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2015
|
Calandra, Roberto; Ivaldi, Serena; Deisenroth, Marc; Rueckert, Elmar; Peters, Jan Learning Inverse Dynamics Models with Contacts Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. @inproceedings{Calandra2015,
title = {Learning Inverse Dynamics Models with Contacts},
author = {Roberto Calandra and Serena Ivaldi and Marc Deisenroth and Elmar Rueckert and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/ICRA15Calandra.pdf, Article File},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10794},
key = {codyco},
keywords = {inverse dynamics, model learning, neural network},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2014
|
Rueckert, Elmar Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. @phdthesis{Rueckert2014a,
title = {Biologically inspired motor skill learning in robotics through probabilistic inference},
author = {Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/PhDThesis2014Rueckert.pdf, Article File},
year = {2014},
date = {2014-02-04},
school = {Technical University Graz},
keywords = {graphical models, locomotion, model learning, morphological compuation, movement primitives, policy search, postural control, Probabilistic Inference, Reinforcement Learning, RNN, SOC, spiking},
pubstate = {published},
tppubtype = {phdthesis}
}
|  |

