

Publication List with Images
2014 |
|
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. | 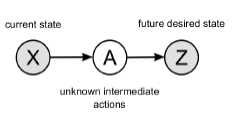 |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. | 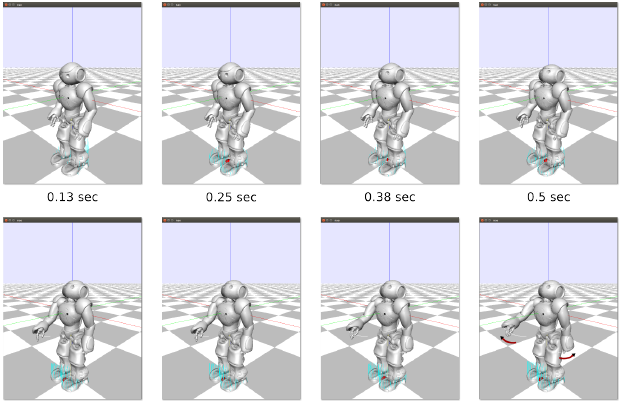 |
2012 |
|
Stochastic Optimal Control Methods for Investigating the Power of Morphological Computation Journal Article In: Artificial Life, vol. 19, no. 1, 2012. |  |
2011 |
|
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. | 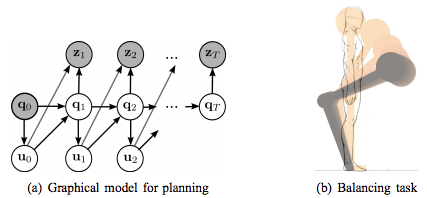 |
Compact List without Images
Journal Articles |
Stochastic Optimal Control Methods for Investigating the Power of Morphological Computation Journal Article In: Artificial Life, vol. 19, no. 1, 2012. |
Proceedings Articles |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. |
A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. |
PhD Theses |
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. |