2016
|
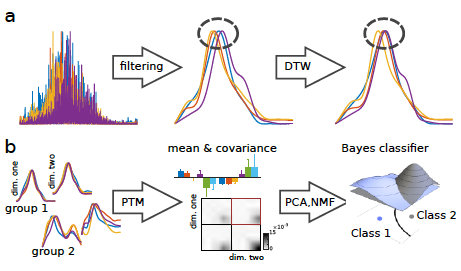
Kohlschuetter, Jan; Peters, Jan; Rueckert, Elmar Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities Proceedings Article In: Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON), 2016. @inproceedings{Kohlschuetter2016,
title = {Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities},
author = {Jan Kohlschuetter and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/KohlschuetterMEDICON_2016.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON)},
crossref = {p10898},
key = {codyco, tacman},
keywords = {graphical models, muscle synergies},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
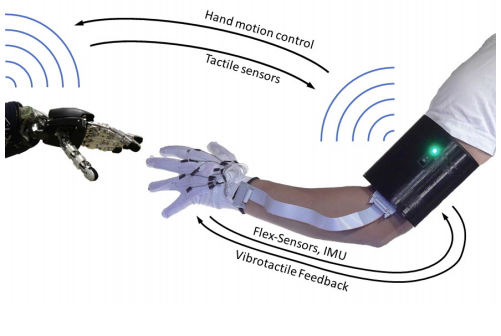
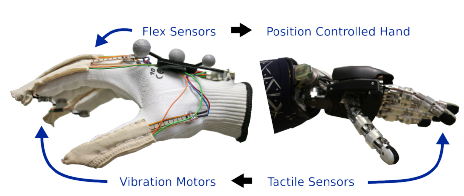
Weber, Paul; Rueckert, Elmar; Calandra, Roberto; Peters, Jan; Beckerle, Philipp A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction Proceedings Article In: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. @inproceedings{ROMANS16_daglove,
title = {A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction},
author = {Paul Weber and Elmar Rueckert and Roberto Calandra and Jan Peters and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/ROMANS2016Weber.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_Arduino_SensorGlove_2015Rueckert.zip, MATLAB Code (JAVA Interface), ARDUINO Firmware
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SensorGloveMexInterface_2015Rueckert.zip, MATLAB Code (MEX-Function Demo Interface)},
year = {2016},
date = {2016-01-01},
booktitle = {Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)},
crossref = {p10949},
key = {codyco},
keywords = {graphical models},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2015
|
Rueckert, Elmar; Lioutikov, Rudolf; Calandra, Roberto; Schmidt, Marius; Beckerle, Philipp; Peters, Jan Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations Conference ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots, 2015. @conference{Rueckert2015b,
title = {Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations},
author = {Elmar Rueckert and Rudolf Lioutikov and Roberto Calandra and Marius Schmidt and Philipp Beckerle and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckertb.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_Arduino_SensorGlove_2015Rueckert.zip, MATLAB Code (JAVA Interface), ARDUINO Firmware
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SensorGloveMexInterface_2015Rueckert.zip, MATLAB Code (MEX-Function Demo Interface)},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
booktitle = {ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots},
crossref = {p10831},
key = {codyco},
keywords = {graphical models},
pubstate = {published},
tppubtype = {conference}
}
|  |
2014
|
Rueckert, Elmar Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. @phdthesis{Rueckert2014a,
title = {Biologically inspired motor skill learning in robotics through probabilistic inference},
author = {Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/PhDThesis2014Rueckert.pdf, Article File},
year = {2014},
date = {2014-02-04},
school = {Technical University Graz},
keywords = {graphical models, locomotion, model learning, morphological compuation, movement primitives, policy search, postural control, Probabilistic Inference, Reinforcement Learning, RNN, SOC, spiking},
pubstate = {published},
tppubtype = {phdthesis}
}
|  |
2013
|
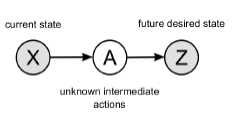
Rueckert, Elmar; Neumann, Gerhard; Toussaint, Marc; Maass, Wolfgang Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. @article{Rueckert2013,
title = { Learned graphical models for probabilistic planning provide a new class of movement primitives},
author = {Elmar Rueckert and Gerhard Neumann and Marc Toussaint and Wolfgang Maass},
url = {https://cps.unileoben.ac.at/wp/Frontiers2013aRueckert.pdf, Article File},
doi = {10.3389/fncom.2012.00097},
year = {2013},
date = {2013-01-02},
journal = {Frontiers in Computational Neuroscience},
volume = {6},
number = {97},
keywords = {graphical models, movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {article}
}
|  |
2011
|
Rueckert, Elmar; Neumann, Gerhard A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. @inproceedings{Rueckert2011,
title = {A study of Morphological Computation by using Probabilistic Inference for Motor Planning},
author = {Elmar Rueckert and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/ICMC2011Rueckert.pdf, Article File},
year = {2011},
date = {2011-01-01},
booktitle = {Proceedings of the 2nd International Conference on Morphological Computation (ICMC)},
pages = {51--53},
crossref = {p10680},
keywords = {graphical models, morphological compuation, Probabilistic Inference, SOC},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

