

Publication List with Images
2016 |
|
Learning soft task priorities for control of redundant robots Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2016. | 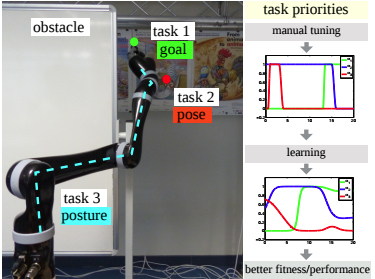 |
2014 |
|
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. | 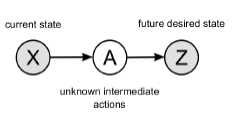 |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. | 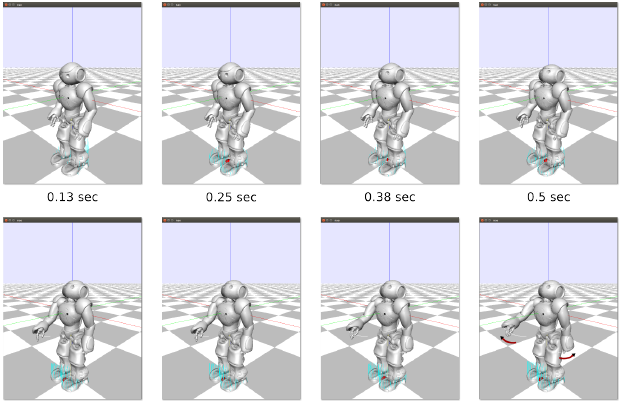 |
2013 |
|
Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems Proceedings Article In: Abstracts of Neural Control of Movement Conference (NCM), Conference Talk, pp. 27–28, 2013. | 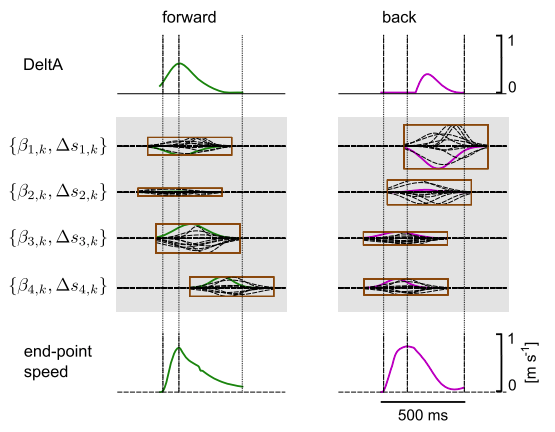 |
Compact List without Images
Proceedings Articles |
Learning soft task priorities for control of redundant robots Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2016. |
Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. |
Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems Proceedings Article In: Abstracts of Neural Control of Movement Conference (NCM), Conference Talk, pp. 27–28, 2013. |
PhD Theses |
Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. |