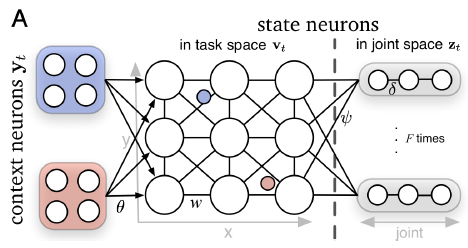
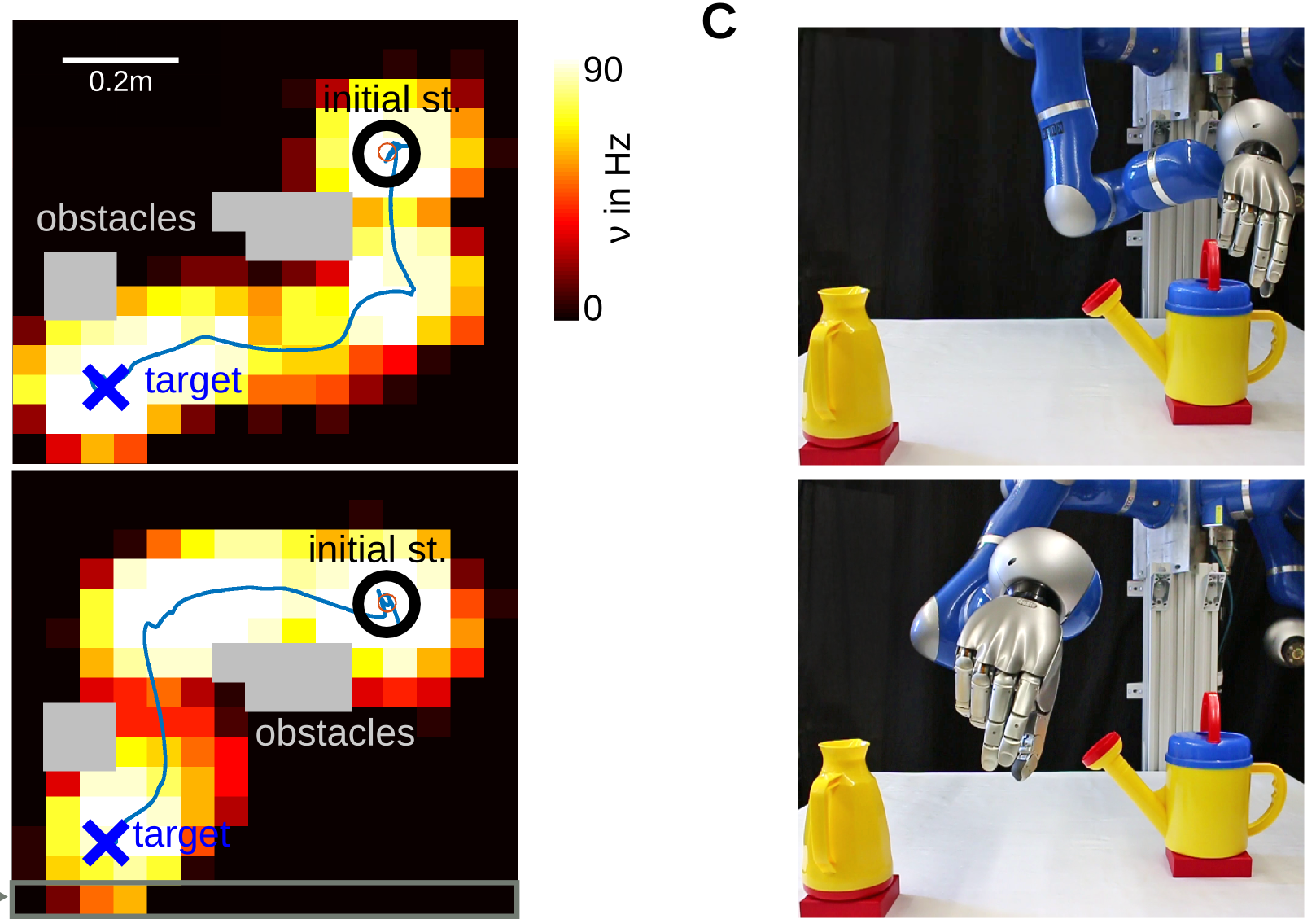
Tanneberg, Daniel; Paraschos, Alexandros; Peters, Jan; Rueckert, Elmar Deep Spiking Networks for Model-based Planning in Humanoids Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{tanneberg_humanoids16,
title = {Deep Spiking Networks for Model-based Planning in Humanoids},
author = {Daniel Tanneberg and Alexandros Paraschos and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Tanneberg.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/videos/humanoids_slower_540p.mp4, Supplementary Video},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10980},
key = {codyco and tacman},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rueckert, Elmar; Kappel, David; Tanneberg, Daniel; Pecevski, Dejan; Peters, Jan Recurrent Spiking Networks Solve Planning Tasks Journal Article In: Nature Publishing Group: Scientific Reports, vol. 6, no. 21142, 2016. @article{Rueckert2016a,
title = {Recurrent Spiking Networks Solve Planning Tasks},
author = {Elmar Rueckert and David Kappel and Daniel Tanneberg and Dejan Pecevski and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning.pdf, Article File
https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning_Supplement.pdf, Supplement
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SpikingNeuralPlanning_2016Rueckert.zip, MATLAB Code},
doi = {10.1038/srep21142},
year = {2016},
date = {2016-01-15},
journal = {Nature Publishing Group: Scientific Reports},
volume = {6},
number = {21142},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |

