2023
|
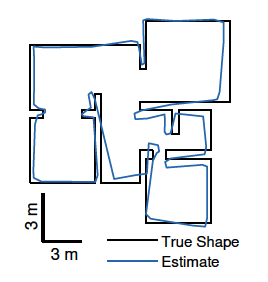
Nwankwo, Linus; Rueckert, Elmar Understanding why SLAM algorithms fail in modern indoor environments Proceedings Article In: International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). , pp. 186 – 194, Cham: Springer Nature Switzerland., 2023. @inproceedings{Nwankwo2023,
title = {Understanding why SLAM algorithms fail in modern indoor environments},
author = {Linus Nwankwo and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/KdZ2E2np5QEnYfL
},
doi = {https://doi.org/10.1007/978-3-031-32606-6_22},
year = {2023},
date = {2023-05-27},
urldate = {2023-05-27},
booktitle = {International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). },
volume = {135},
pages = {186 - 194},
publisher = {Cham: Springer Nature Switzerland.},
series = {Mechanisms and Machine Science},
abstract = {Simultaneous localization and mapping (SLAM) algorithms are essential for the autonomous navigation of mobile robots. With the increasing demand for autonomous systems, it is crucial to evaluate and compare the performance of these algorithms in real-world environments.
In this paper, we provide an evaluation strategy and real-world datasets to test and evaluate SLAM algorithms in complex and challenging indoor environments. Further, we analysed state-of-the-art (SOTA) SLAM algorithms based on various metrics such as absolute trajectory error, scale drift, and map accuracy and consistency. Our results demonstrate that SOTA SLAM algorithms often fail in challenging environments, with dynamic objects, transparent and reflecting surfaces. We also found that successful loop closures had a significant impact on the algorithm’s performance. These findings highlight the need for further research to improve the robustness of the algorithms in real-world scenarios. },
keywords = {mobile navigation, robotics, SLAM},
pubstate = {published},
tppubtype = {inproceedings}
}
Simultaneous localization and mapping (SLAM) algorithms are essential for the autonomous navigation of mobile robots. With the increasing demand for autonomous systems, it is crucial to evaluate and compare the performance of these algorithms in real-world environments.
In this paper, we provide an evaluation strategy and real-world datasets to test and evaluate SLAM algorithms in complex and challenging indoor environments. Further, we analysed state-of-the-art (SOTA) SLAM algorithms based on various metrics such as absolute trajectory error, scale drift, and map accuracy and consistency. Our results demonstrate that SOTA SLAM algorithms often fail in challenging environments, with dynamic objects, transparent and reflecting surfaces. We also found that successful loop closures had a significant impact on the algorithm’s performance. These findings highlight the need for further research to improve the robustness of the algorithms in real-world scenarios. | 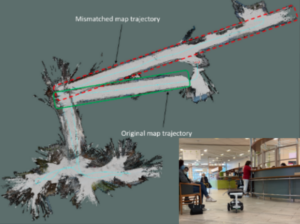 |
2022
|
Xue, Honghu; Song, Rui; Petzold, Julian; Hein, Benedikt; Hamann, Heiko; Rueckert, Elmar End-To-End Deep Reinforcement Learning for First-Person Pedestrian Visual Navigation in Urban Environments Proceedings Article In: International Conference on Humanoid Robots (Humanoids 2022), 2022. @inproceedings{Xue2022b,
title = {End-To-End Deep Reinforcement Learning for First-Person Pedestrian Visual Navigation in Urban Environments},
author = {Honghu Xue and Rui Song and Julian Petzold and Benedikt Hein and Heiko Hamann and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/RzMQWqsFarQ6Kw4},
year = {2022},
date = {2022-09-26},
urldate = {2022-09-26},
publisher = {International Conference on Humanoid Robots (Humanoids 2022)},
abstract = {We solve a visual navigation problem in an urban setting via deep reinforcement learning in an end-to-end manner. A major challenge of a first-person visual navigation problem lies in severe partial observability and sparse positive experiences of reaching the goal. To address partial observability, we propose a novel 3D-temporal convolutional network to encode sequential historical visual observations, its effectiveness is verified by comparing to a commonly-used frame-stacking
approach. For sparse positive samples, we propose an improved automatic curriculum learning algorithm NavACL+, which
proposes meaningful curricula starting from easy tasks and gradually generalizes to challenging ones. NavACL+ is shown to
facilitate the learning process, greatly improve the task success rate on difficult tasks by at least 40% and offer enhanced
generalization to different initial poses compared to training from a fixed initial pose and the original NavACL algorithm.},
keywords = {Autonomous Navigation, Deep Learning, mobile navigation},
pubstate = {published},
tppubtype = {inproceedings}
}
We solve a visual navigation problem in an urban setting via deep reinforcement learning in an end-to-end manner. A major challenge of a first-person visual navigation problem lies in severe partial observability and sparse positive experiences of reaching the goal. To address partial observability, we propose a novel 3D-temporal convolutional network to encode sequential historical visual observations, its effectiveness is verified by comparing to a commonly-used frame-stacking
approach. For sparse positive samples, we propose an improved automatic curriculum learning algorithm NavACL+, which
proposes meaningful curricula starting from easy tasks and gradually generalizes to challenging ones. NavACL+ is shown to
facilitate the learning process, greatly improve the task success rate on difficult tasks by at least 40% and offer enhanced
generalization to different initial poses compared to training from a fixed initial pose and the original NavACL algorithm. |  |
2021
|
Rottmann, N.; Denz, R.; Bruder, R.; Rueckert, E. Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems Proceedings Article In: European Conference on Mobile Robots (ECMR 2021), 2021. @inproceedings{Rottmann2021,
title = {Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems},
author = {N. Rottmann and R. Denz and R. Bruder and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2021Rottmann.pdf, Article File},
year = {2021},
date = {2021-08-31},
booktitle = {European Conference on Mobile Robots (ECMR 2021)},
keywords = {mobile navigation, Probabilistic Inference},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2020
|
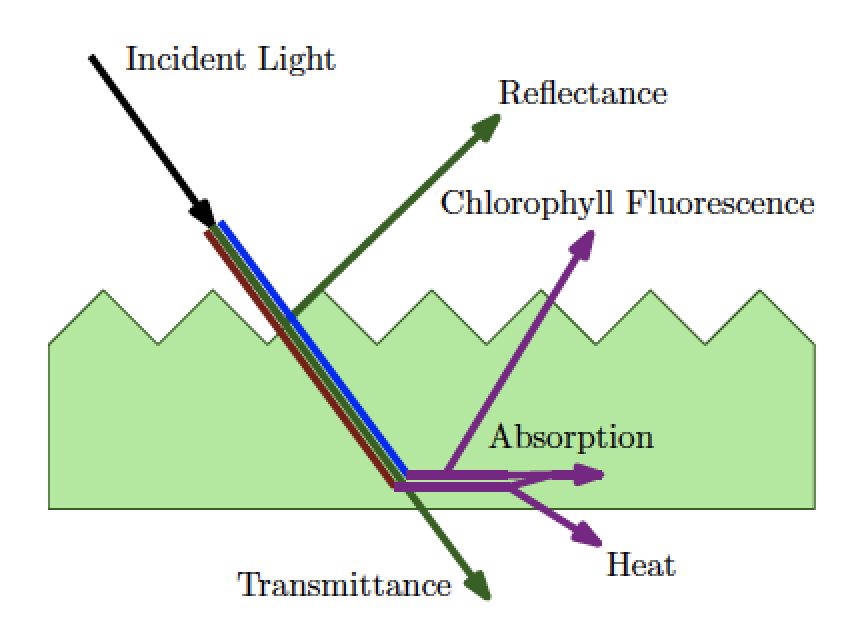
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors Proceedings Article In: IEEE SENSORS , pp. 1–4, 2020. @inproceedings{Rottmann2020b,
title = {Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IEEESensors2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-26},
booktitle = {IEEE SENSORS },
journal = { IEEE SENSORS 2020 Conference, to be held from October 25-28, 2020},
pages = {1--4},
keywords = {mobile navigation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
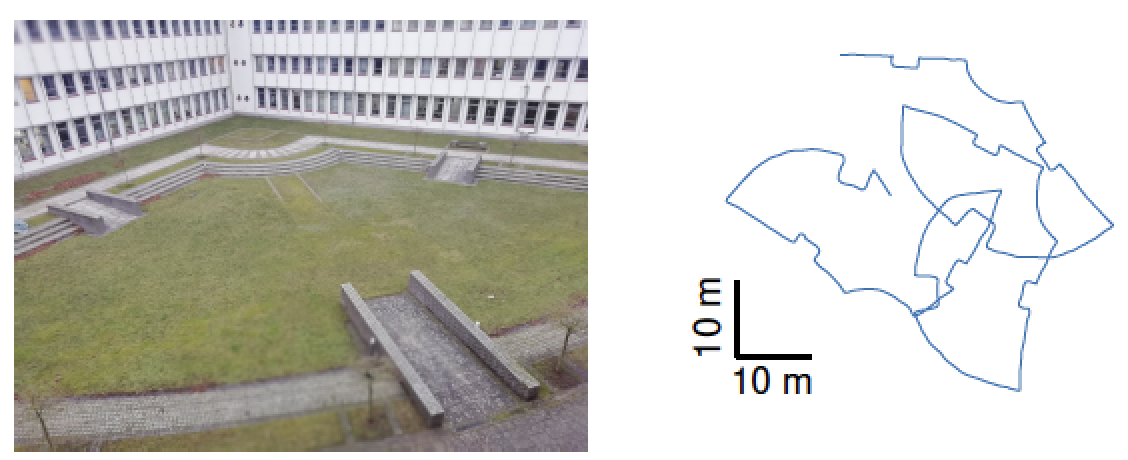
Rottmann, N.; Bruder, R.; Xue, H.; Schweikard, A.; Rueckert, E. Parameter Optimization for Loop Closure Detection in Closed Environments Proceedings Article In: Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS), pp. 1–8, 2020. @inproceedings{Rottmann2020c,
title = {Parameter Optimization for Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and H. Xue and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROSWS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS)},
pages = {1--8},
keywords = {mobile navigation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2019
|
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Loop Closure Detection in Closed Environments Proceedings Article In: European Conference on Mobile Robots (ECMR 2019), 2019, ISBN: 978-1-7281-3605-9. @inproceedings{Rottmann2019b,
title = {Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2019Rottmann.pdf, Article File},
isbn = {978-1-7281-3605-9},
year = {2019},
date = {2019-09-04},
booktitle = {European Conference on Mobile Robots (ECMR 2019)},
keywords = {mobile navigation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors Proceedings Article In: Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS), Prague, Czech Republic , 2019, ( February 22-24, 2019). @inproceedings{Rottmann2019,
title = {Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/Biosignals2018Rottmann.pdf, Article File},
year = {2019},
date = {2019-02-22},
booktitle = {Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS)},
address = {Prague, Czech Republic },
note = { February 22-24, 2019},
keywords = {constraint optimization, mobile navigation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

