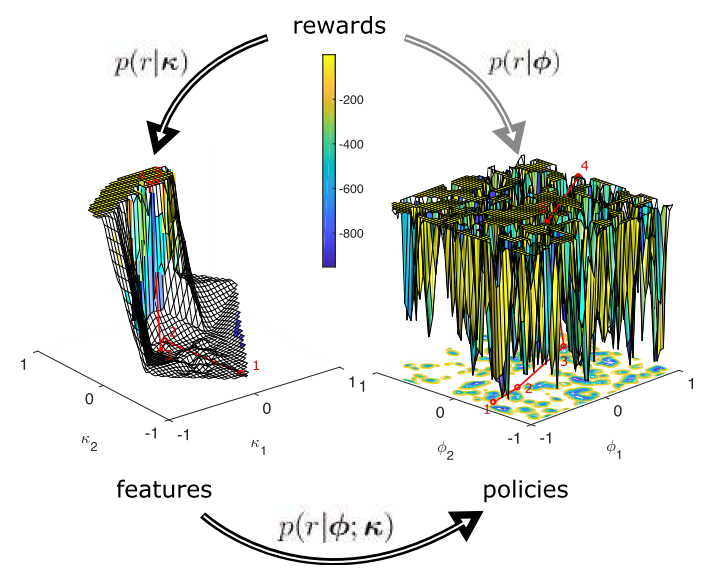
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
| 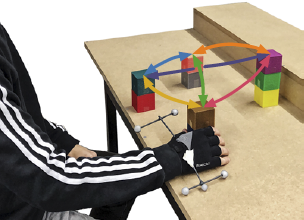 |
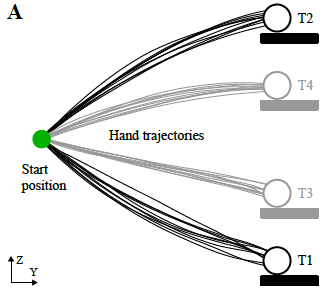
Jamsek, Marko; Kunavar, Tjasa; Bobek, Urban; Rueckert, Elmar; Babic, Jan Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Jamsek2021,
title = {Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller},
author = {Marko Jamsek and Tjasa Kunavar and Urban Bobek and Elmar Rueckert and Jan Babic},
url = {../wp/RAL2021Jamsek.pdf, Article File},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
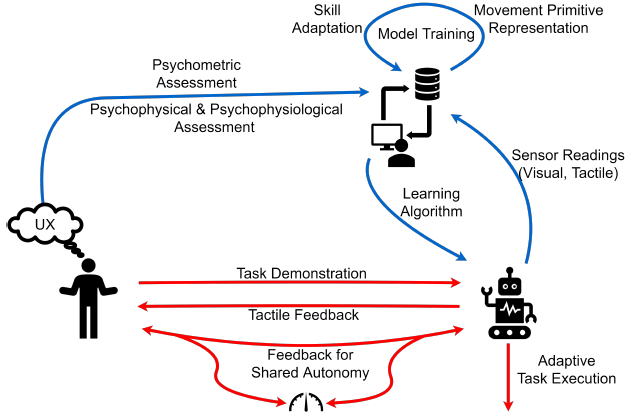
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
pages = {1--28},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
Rottmann, N.; Kunavar, T.; Babič, J.; Peters, J.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS’ 2020), 2020. @inproceedings{Rottmann2020HiBO,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and T. Kunavar and J. Babič and J. Peters and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {International Conference on Intelligent Robots and Systems (IROS’ 2020)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

