As direct observations and permanent measurements during steelmaking processes are not possible, modelling has become a powerful tool. The technique of fundamental-based metallurgical modelling is well-established and demonstrates its capabilities in a wide range of applications in modern steelmaking. Following the general trend, data-driven approaches are increasingly used today in various areas of metallurgical modelling, in addition to these classical fundamental approaches. Depending on the field of application, fundamental-based and data-driven models both have their own advantages and disadvantages.
The overall goal of the present thesis is to combine both models in order to leverage the strengths of these two different methods. The first step is to apply several different data-driven models and compare them to the metallurgical model to see how they perform differently. In the second phase, various ways of combining data-driven models with the metallurgical model should be investigated. For example, this could be done via a data-driven optimization of its tuning parameters or by replacing them with data-driven models. Also, adding a data-driven residual term to the metallurgical model could be possible. Based on these findings, the third part of the thesis should focus on online learning and methods of how to avoid an off-drifting of the model. The fourth and last section of the thesis should investigate various ways of detecting errors in new data. While point one and two are the main focus of the thesis, point three and four are considered to be optional.
Tentative Work Plan
The following concrete tasks will be focused on:
Literature research.
Training of different data-driven models in Python.
Performance comparison between data-driven models and the metallurgical model.
Combination of selected data-driven models and the metallurgical model in Python.
(Optional) Investigate different ways for online learning and live performance evaluation.
Theoretical difficulty: high Practical difficulty: low
Abstract
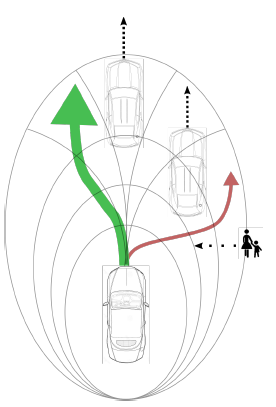
Wir Menschen sind in der Lage unter widrigen Bedingungen z.B. bei eingeschränkter Sicht, oder bei Störungen komplexe Vorgänge wahrzunehmen, vorherzusagen und innerhalb von wenigen Millisekunden zusammenhängende Entscheidungen zu treffen. Mit dem zunehmenden Grad der Automatisierung steigen auch die Anforderungen an künstliche Systeme. Immer komplexere und größere Datenmengen müssen verarbeitet werden um autonome Entscheidungen zu treffen. Mit gängigen KI Ansätzen stoßen wir aufgrund der konvergierenden Miniaturisierung an Grenzen, die z.B. im Bereich des autonomen Fahrens nicht ausreichen, um ein sicheres autonomes System zu entwickeln.
Ziel dieser Forschung ist es probabilistische Vorhersagemodelle in massiv parallelisierbaren neuronalen Netzen zu implementieren und mit diesen komplexe Entscheidungen Aufgrund erlernter interner Vorhersagemodelle zu treffen. Die neuronalen Modelle verarbeiten hoch dimensionale Daten moderner und innovativer taktiler und visueller Sensoren. Wir testen die neuronalen Vorhersage und Entscheidungsmodelle in humanoiden Roboteranwendungen in dynamischen Umgebungen.
Unser Ansatz beruht auf der Theorie der probabilistischen Informationsverarbeitung in neuronalen Netzen und unterscheidet sich somit grundlegend von den gängigen Methoden tiefer neuronaler Netze. Die zugrundeliegende Theorie ermöglicht weitreichende Modelleinblicke und erlaubt neben den Vorhersagen von Mittelwerten auch Unsicherheiten und Korrelationen. Diese zusätzlichen Vorhersagen sind entscheidend für verlässliche, erklärbare und robuste künstliche Systeme und sind eines der größten offenen Probleme in der künstlichen Intelligenz Forschung.
Tentative Work Plan
To achieve our aim, the following concrete tasks will be focused on:
Literature research on graphical model inference of motion plans.
Toy Task implementation in Python.
Implementation of GMMs, PTSMs and combinations in Python.
Visualization and analysis of the prediction performance. Definition of suitable evaluation criteria.
(Optional) Implementation in a realistic driving simulator.
Wir Menschen sind in der Lage unter widrigen Bedingungen z.B. bei eingeschränkter Sicht, oder bei Störungen komplexe Vorgänge wahrzunehmen, vorherzusagen und innerhalb von wenigen Millisekunden zusammenhängende Entscheidungen zu treffen. Mit dem zunehmenden Grad der Automatisierung steigen auch die Anforderungen an künstliche Systeme. Immer komplexere und größere Datenmengen müssen verarbeitet werden um autonome Entscheidungen zu treffen. Mit gängigen KI Ansätzen stoßen wir aufgrund der konvergierenden Miniaturisierung an Grenzen, die z.B. im Bereich des autonomen Fahrens nicht ausreichen, um ein sicheres autonomes System zu entwickeln.
Ziel dieser Forschung ist es probabilistische Vorhersagemodelle in massiv parallelisierbaren neuronalen Netzen zu implementieren und mit diesen komplexe Entscheidungen Aufgrund erlernter interner Vorhersagemodelle zu treffen. Die neuronalen Modelle verarbeiten hoch dimensionale Daten moderner und innovativer taktiler und visueller Sensoren. Wir testen die neuronalen Vorhersage und Entscheidungsmodelle in humanoiden Roboteranwendungen in dynamischen Umgebungen.
Der Lehrstuhl für Cyber-Physical-Systems widmet sich anwendungsorientierter Grundlagenforschung in den Bereichen der künstlichen Intelligenz, der Digitalisierung von Industrieprozessen und der Robotik. Ein Focus liegt dabei auf der Modelierung von intelligenten menschlichen Lernprozessen mit dem Ziel effiziente Lernmethoden und Vorhersagemodelle für cyber-physikalische Systeme zu entwickeln.
In this thesis, the student has the unique opportunity to investigate supervised machine learning methods for predicting yield strengths using probabilistic regression models and deep learning approaches. The thesis is implemented with support of the MSC Software GmbH and the Stahl- und Walzwerk Marienhütte GmbH in Graz.
In the image above and below you see the production line at the Stahl- und Walzwerk Marienhütte GmbH in Graz.
To ensure the high quality standards, frequent ‘yield strength’ measurements are performed. These measurements have resulted in a large dataset which can now be analyzed and used to learn a prediction model. First tests were promising and the thesis will be very likely a big success.
The goal of this thesis is to analyze the data and to learn prediction models taking uncertainty estimates into account.
The models will be implemented and tested in Python.
Tentative Work Plan
To achieve our aim, the following concrete tasks will be focused on:
Literature research on the underlying physical & chemical processes.
Data analysis, filtering, preprocessing, visualization of the existing data.
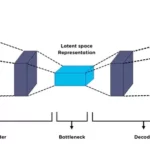
Implementation of deep neural networks (Variational Autoencoder), neural processes and GPs in Python. Baseline implementations are existing.
Visualization and analysis of the prediction performance. An outlier detection and warning system should be implemented.
(Optional) Implementation of neural time-series models like LSTMs.
1 position for a fully employed University Assistant at the Chair of Cyber-Physical-Systems at the earliest possible date or beginning on 1st of July 2022 in a full-time(100%)4-year term of employment. Salary Group B1 to Uni-KV, monthly minimum charge excl. SZ.: € 3.058,60 for 40 hours per week (14 times a year), actual classification takes place according to accountable activity-specific previous experience.
We are looking for a motivated student interested in a PhD thesis on “Machine Learning of Robot Motor Skills”. The goal of the doctoral thesis is to develop probabilistic or deep neural networks for interactive learning of autonomous systems and industrial processes. This will involve processing complex sensor data such as from RGB-D cameras, tactile data and sensory data of the industrial machines for motion control of robotic systems. The developed models will be tested using realistic industrial applications for process modeling and with robotic systems within our AI Robot Lab.
What we offer
The opportunity to work on research ideas of exciting modern topics in artificial intelligence and robotics, to develop your own ideas, to be part of a young and newly formed team, to go on international research trips, and to receive targeted career guidance for a successful scientific career.
Job requirements
Completed master’s degree in computer science, physics, telematics, statistics, mathematics, electrical engineering, mechanics, robotics, mechanical engineering or an equivalent education in the sense of the desired qualification; Programming experience in one of the languages C++, Python or similar; Experience in robotics, with ROS, and reinforcement learning or in machine learning. Willingness and ability for scientific work in research including publications with the possibility to write a dissertation.
Desired additional qualifications
Experience with movement primitives, Keras, Tensorflow and graphical models. Basic knowledge of Linux is advantageous. Good English skills and willingness to travel for research and to give technical presentations.
The Montanuniversitaet Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.
You are interested in working with real robots and want to understand how such machines ‘learn’?
This project will enable you to dig into the fascinating world of robot learning.
You will work alone or in a team on modern, state-of-the art hardware at the Chair of CPS.
We offer complex robotic systems, powerful PCs and GPU clusters to work with.
The course provides a structured and well motivated overview over modern techniques and tools which enable the students to define learning problems in Cyber-Physical-Systems.
Note that offer two courses, 190.014 and 190.019. You may select two project topics or continue your project in the second course.
Have a look at our project presentations: Link to Slides
Selected Topics (Many more are available upon request)
Univ.-Prof. Dr. Elmar Rueckert is organizing this research seminar. Topics include research in AI, machine and deep learning, robotics, cyber-physical-systems and process informatics.
Language: English only
Are you an undergraduate, graduate, or doctoral student and want to learn more about AI?
This course will give you the opportunity to listen to research presentations of latest achievements. The target audience are non-experts. Thus no prior knowledge in AI is required.
To get the ECTS credits, you will select a research paper, read it and present it within the research seminar (10-15 min presentation). Instead of selecting a paper of our list, you can also suggest a paper. This suggestion has to be discussed with Univ.-Prof. Dr. Elmar Rueckert first.
After the presentation, the paper is discussed for 10-15 min.
Further, external presenters that are leading researchers in AI will be invited. External speakers will present their research in 30-45 min, followed by a 15 min discussion.