

Description
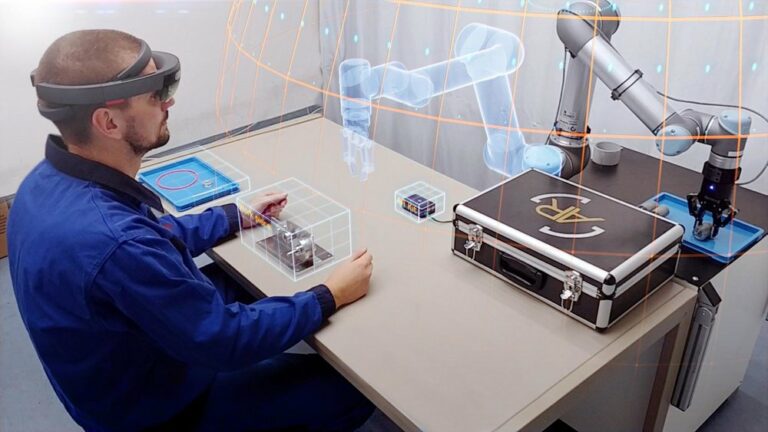
Mixed Reality (AR) interface based on Unity 3D for intuitive programming of robotic manipulators (UR3). The interface will be implemented within on the ROS 2 robotic framework.
Note: This project is also offered as Internship position.
Abstract
Robots will become a necessity for every business in the near future. Especially companies that rely heavily on the constant manipulation of objects will need to be able to constantly repurpose their robots to meet the ever changing demands. Furthermore, with the rise of Machine Learning, human collaborators or ” robot teachers” will need a more intuitive interface to communicate with them, either when interacting with them or when teaching them.
In this project we will develop a novel Mixed (Augmented) Reality Interface for teleoperating the UR3 robotic manipulator. For this purpose we will use AR glasses to augment the user’s reality with information about the robot and enable intuitive programming of the robot. The interface will be implemented on a ROS 2 framework for enhanced scalability and better integration potential to other devices.
Outcomes
This thesis will result to an innovative graphical interface that enables non-experts to program a robotic manipulator.
The student will get valuable experience in the Robot Operating System (ROS) framework and developing graphical interfaces on Unity. The student will also get a good understanding of robotic manipulators (like UR3) and develop a complete engineering project.
Qualifications
- Currently pursuing a Bachelor’s or Master’s degree in Computer Science, Electrical Engineering, Mechanical Engineering or related fields.
- Good programming skills in C# and Unity 3D
- Familiarity with ROS or other robotic frameworks
- Basic knowledge of 3D modeling and animation
- Good written and verbal communication skills in English.
- (optional) Experience with mixed reality development and programming
Interested?
If this project sounds like fun to you, please contact Fotios Lygerakis by email at fotios.lygerakis@unileoben.ac.at or simple visit us at our chair in the Metallurgie building, 1st floor.
[…] Note: This project is also offered as B.Sc or M.Sc. Thesis […]