2021
|
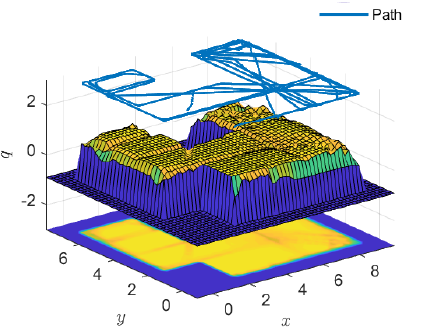
Rottmann, N.; Denz, R.; Bruder, R.; Rueckert, E. Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems Proceedings Article In: European Conference on Mobile Robots (ECMR 2021), 2021. @inproceedings{Rottmann2021,
title = {Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems},
author = {N. Rottmann and R. Denz and R. Bruder and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2021Rottmann.pdf, Article File},
year = {2021},
date = {2021-08-31},
booktitle = {European Conference on Mobile Robots (ECMR 2021)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
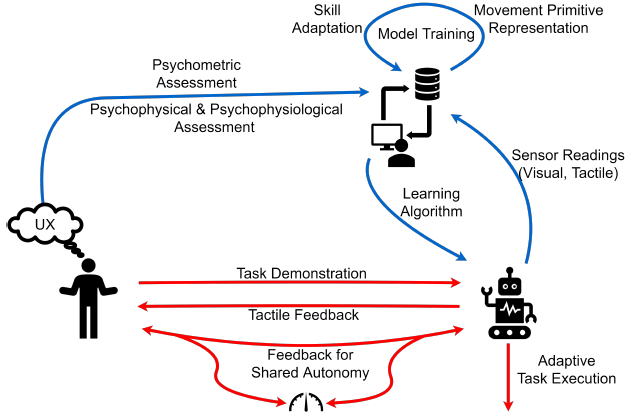
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
pages = {1--28},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
2020
|
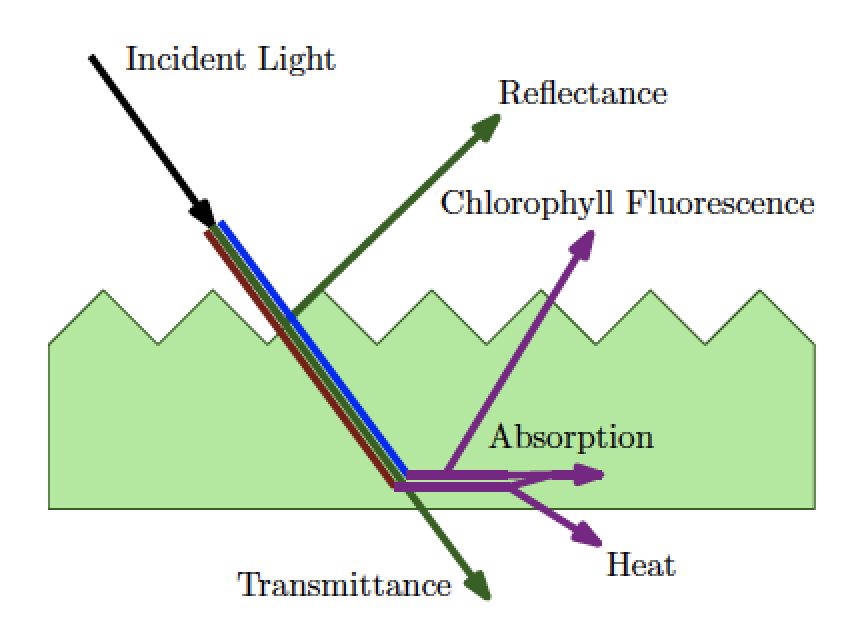
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors Proceedings Article In: IEEE SENSORS Conference, pp. 1–4, 2020. @inproceedings{Rottmann2020b,
title = {Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IEEESensors2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-26},
urldate = {2020-10-26},
booktitle = {IEEE SENSORS Conference},
journal = { IEEE SENSORS 2020 Conference, to be held from October 25-28, 2020},
pages = {1--4},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
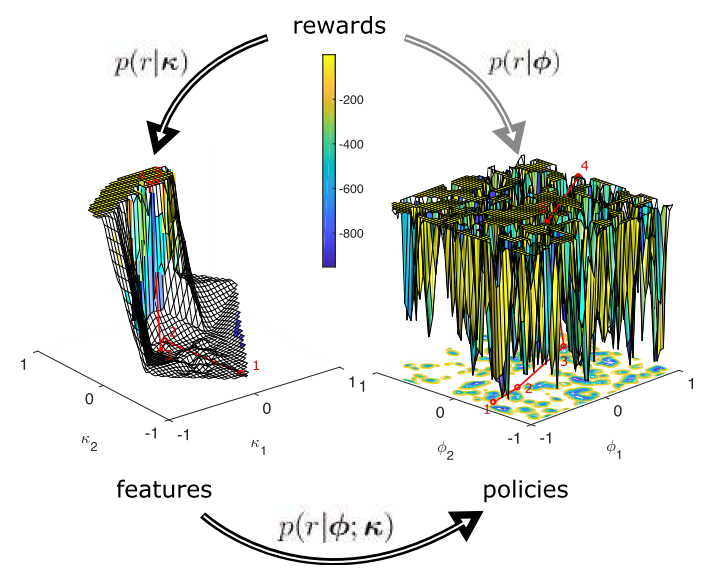
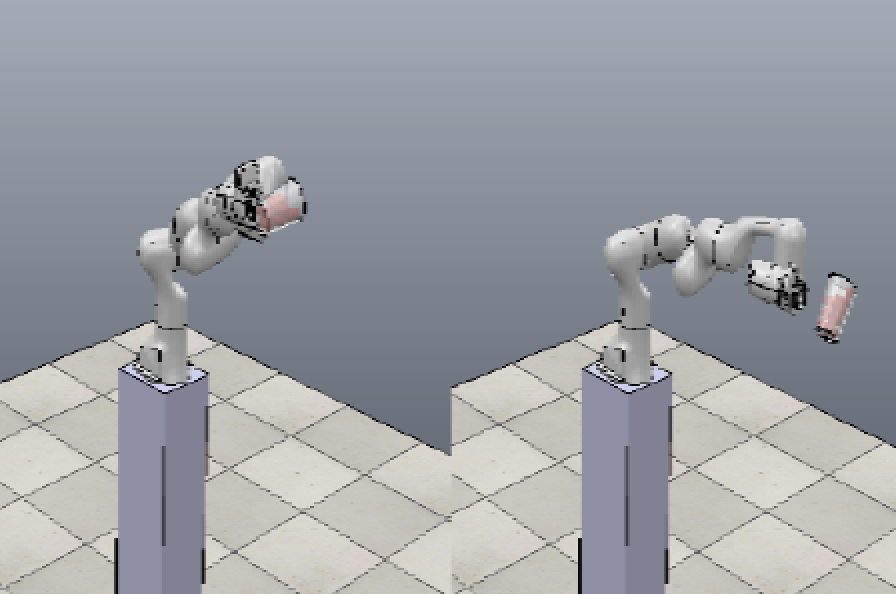
Rottmann, N.; Kunavar, T.; Babič, J.; Peters, J.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS’ 2020), 2020. @inproceedings{Rottmann2020HiBO,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and T. Kunavar and J. Babič and J. Peters and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {International Conference on Intelligent Robots and Systems (IROS’ 2020)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
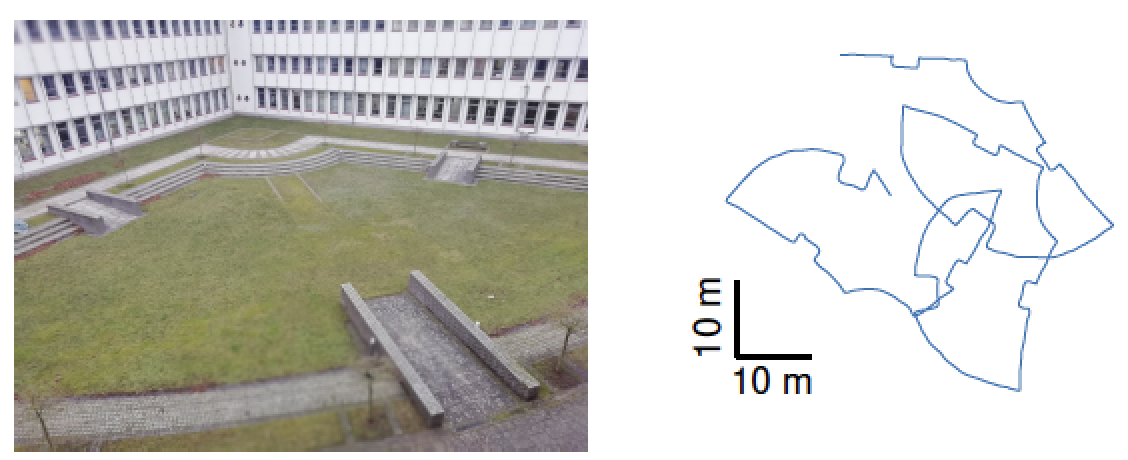
Rottmann, N.; Bruder, R.; Xue, H.; Schweikard, A.; Rueckert, E. Parameter Optimization for Loop Closure Detection in Closed Environments Conference Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS), 2020. @conference{Rottmann2020c,
title = {Parameter Optimization for Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and H. Xue and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROSWS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
urldate = {2020-10-25},
booktitle = {Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS)},
pages = {1--8},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
|  |
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. A novel Chlorophyll Fluorescence based approach for Mowing Area Classification Journal Article In: IEEE Sensors Journal, 2020. @article{Rottmann2020d,
title = {A novel Chlorophyll Fluorescence based approach for Mowing Area Classification},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IEEESensorsJournal2020Rottmann.pdf, Article File},
doi = {10.1109/JSEN.2020.3032722},
year = {2020},
date = {2020-10-12},
journal = {IEEE Sensors Journal},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|  |
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2019
|
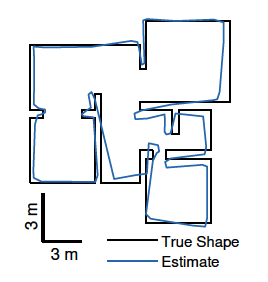
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Loop Closure Detection in Closed Environments Proceedings Article In: European Conference on Mobile Robots (ECMR 2019), 2019, ISBN: 978-1-7281-3605-9. @inproceedings{Rottmann2019b,
title = {Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2019Rottmann.pdf, Article File},
isbn = {978-1-7281-3605-9},
year = {2019},
date = {2019-09-04},
booktitle = {European Conference on Mobile Robots (ECMR 2019)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors Proceedings Article In: Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS), Prague, Czech Republic , 2019, ( February 22-24, 2019). @inproceedings{Rottmann2019,
title = {Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/Biosignals2018Rottmann.pdf, Article File},
year = {2019},
date = {2019-02-22},
booktitle = {Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS)},
address = {Prague, Czech Republic },
note = { February 22-24, 2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |


