2024
|
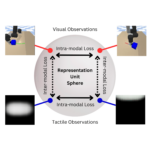
Lygerakis, Fotios; Dave, Vedant; Rueckert, Elmar M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Lygerakis2024,
title = {M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation},
author = {Fotios Lygerakis and Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/NPejb2Fp4Y8LeyZ},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Contrastive Learning, Manipulation, Multimodal Reinforcement Learning, Multimodal Representation Learning, Reinforcement Learning, Robot Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2022
|
Dave, Vedant; Rueckert, Elmar Can we infer the full-arm manipulation skills from tactile targets? Workshop Advances in Close Proximity Human-Robot Collaboration Workshop, International Conference on Humanoid Robots (Humanoids), 2022. @workshop{Dave2022WS,
title = {Can we infer the full-arm manipulation skills from tactile targets?},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/f/562953},
year = {2022},
date = {2022-11-28},
urldate = {2022-11-28},
booktitle = {Advances in Close Proximity Human-Robot Collaboration Workshop},
publisher = {International Conference on Humanoid Robots (Humanoids)},
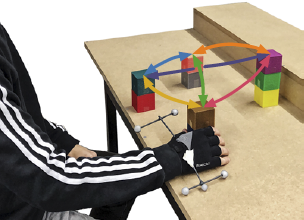
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios.},
keywords = {Grasping, Manipulation, Probabilistic Movement Primitives, Tactile Sensing},
pubstate = {published},
tppubtype = {workshop}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios. | 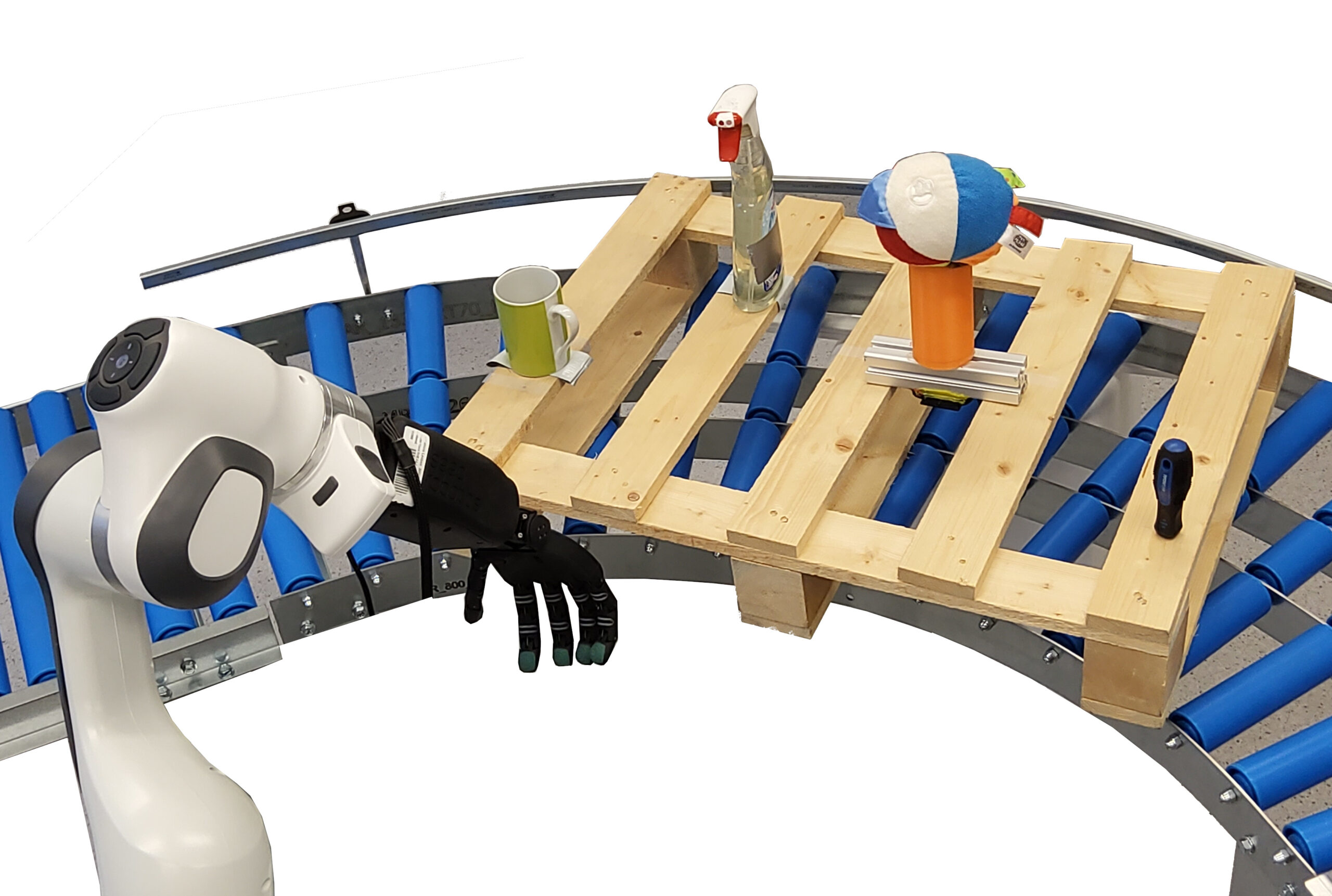 |
Dave, Vedant; Rueckert, Elmar Predicting full-arm grasping motions from anticipated tactile responses Proceedings Article In: International Conference on Humanoid Robots (Humanoids), pp. 464-471, IEEE, 2022, ISBN: 979-8-3503-0979-9. @inproceedings{Dave2022,
title = {Predicting full-arm grasping motions from anticipated tactile responses},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/WzGSNtc5WRLN3EL},
doi = {10.1109/Humanoids53995.2022.9999743},
isbn = {979-8-3503-0979-9},
year = {2022},
date = {2022-09-26},
urldate = {2022-09-26},
booktitle = {International Conference on Humanoid Robots (Humanoids)},
pages = {464-471},
publisher = {IEEE},
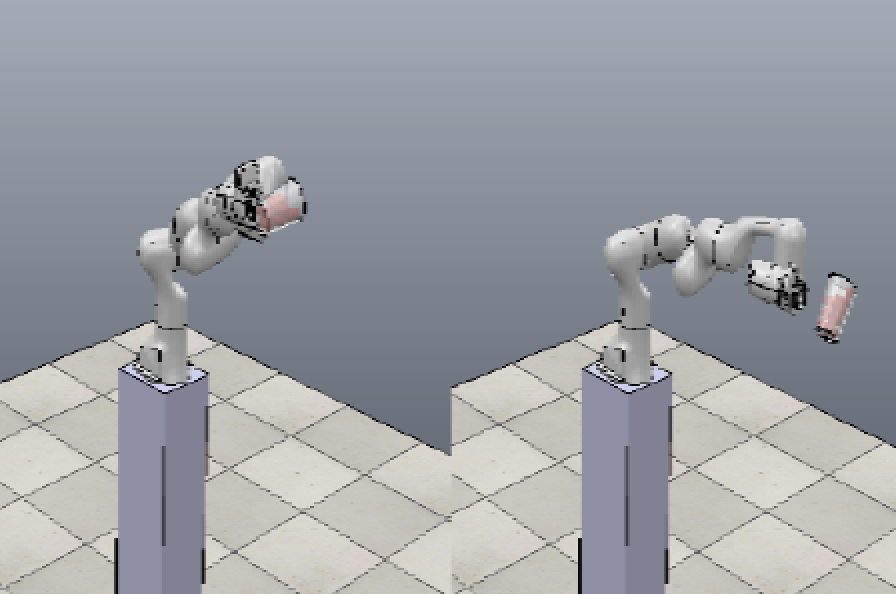
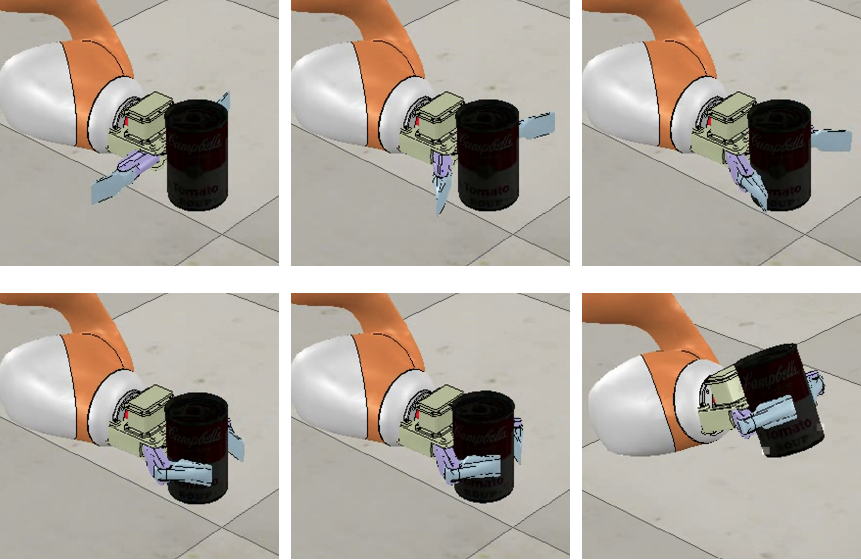
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations.},
keywords = {Grasping, Manipulation, Probabilistic Movement Primitives, Tactile Sensing},
pubstate = {published},
tppubtype = {inproceedings}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations. |  |
Leonel, Rozo*; Vedant, Dave* Orientation Probabilistic Movement Primitives on Riemannian Manifolds Proceedings Article In: Conference on Robot Learning (CoRL), pp. 11, 2022, (* equal contribution). @inproceedings{Leonel2022,
title = {Orientation Probabilistic Movement Primitives on Riemannian Manifolds},
author = {Leonel, Rozo* and Vedant, Dave*},
url = {https://cps.unileoben.ac.at/wp/orientation_probabilistic_move.pdf, Article File},
year = {2022},
date = {2022-01-11},
urldate = {2022-01-11},
booktitle = {Conference on Robot Learning (CoRL)},
volume = {164},
pages = {11},
abstract = {Learning complex robot motions necessarily demands to have models that are able to encode and retrieve full-pose trajectories when tasks are defined in operational spaces. Probabilistic movement primitives (ProMPs) stand out as a principled approach that models trajectory distributions learned from demonstrations. ProMPs allow for trajectory modulation and blending to achieve better generalization to novel situations. However, when ProMPs are employed in operational space, their original formulation does not directly apply to full-pose movements including rotational trajectories described by quaternions. This paper proposes a Riemannian formulation of ProMPs that enables encoding and retrieving of quaternion trajectories. Our method builds on Riemannian manifold theory,
and exploits multilinear geodesic regression for estimating the ProMPs parameters. This novel approach makes ProMPs a suitable model for learning complex full-pose robot motion patterns. Riemannian ProMPs are tested on toy examples to illustrate their workflow, and on real learning-from-demonstration experiments.},
note = {* equal contribution},
keywords = {Manipulation, Probabilistic Movement Primitives, Riemannian Manifolds},
pubstate = {published},
tppubtype = {inproceedings}
}
Learning complex robot motions necessarily demands to have models that are able to encode and retrieve full-pose trajectories when tasks are defined in operational spaces. Probabilistic movement primitives (ProMPs) stand out as a principled approach that models trajectory distributions learned from demonstrations. ProMPs allow for trajectory modulation and blending to achieve better generalization to novel situations. However, when ProMPs are employed in operational space, their original formulation does not directly apply to full-pose movements including rotational trajectories described by quaternions. This paper proposes a Riemannian formulation of ProMPs that enables encoding and retrieving of quaternion trajectories. Our method builds on Riemannian manifold theory,
and exploits multilinear geodesic regression for estimating the ProMPs parameters. This novel approach makes ProMPs a suitable model for learning complex full-pose robot motion patterns. Riemannian ProMPs are tested on toy examples to illustrate their workflow, and on real learning-from-demonstration experiments. | 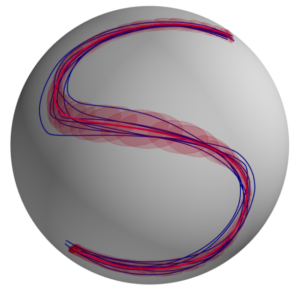 |
2021
|
Denz, R.; Demirci, R.; Cansev, E.; Bliek, A.; Beckerle, P.; Rueckert, E.; Rottmann, N. A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. @inproceedings{Denz2021,
title = {A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning},
author = {R. Denz and R. Demirci and E. Cansev and A. Bliek and P. Beckerle and E. Rueckert and N. Rottmann},
url = {https://cps.unileoben.ac.at/wp/ICAR2021Denz.pdf, Article File},
year = {2021},
date = {2021-12-06},
booktitle = {International Conference on Advanced Robotics },
pages = {7},
keywords = {Grasping, human motor control, Manipulation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Manipulation, movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {article}
}
|  |
2020
|
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {Manipulation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Cartoni, E.; Mannella, F.; Santucci, V. G.; Triesch, J.; Rueckert, E.; Baldassarre, G. REAL-2019: Robot open-Ended Autonomous Learning competition Journal Article In: Proceedings of Machine Learning Research, vol. 123, pp. 142-152, 2020, (NeurIPS 2019 Competition and Demonstration Track). @article{Cartoni2020,
title = {REAL-2019: Robot open-Ended Autonomous Learning competition},
author = {E. Cartoni and F. Mannella and V.G. Santucci and J. Triesch and E. Rueckert and G. Baldassarre},
editor = {H. J. Escalante and R. Hadsell},
url = {https://cps.unileoben.ac.at/wp/PMLR2020Cartoni.pdf, Article File},
year = {2020},
date = {2020-06-20},
journal = {Proceedings of Machine Learning Research},
volume = {123},
pages = {142-152},
note = {NeurIPS 2019 Competition and Demonstration Track},
keywords = {Manipulation, Simulation},
pubstate = {published},
tppubtype = {article}
}
|  |
2017
|
Thiem, Simon; Stark, Svenja; Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Simulation of the underactuated Sake Robotics Gripper in V-REP Proceedings Article In: Workshop at the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Thiem2017b,
title = {Simulation of the underactuated Sake Robotics Gripper in V-REP},
author = {Simon Thiem and Svenja Stark and Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Thiem.pdf},
year = {2017},
date = {2017-11-15},
booktitle = {Workshop at the International Conference on Humanoid Robots (HUMANOIDS)},
keywords = {Manipulation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

