2022
|
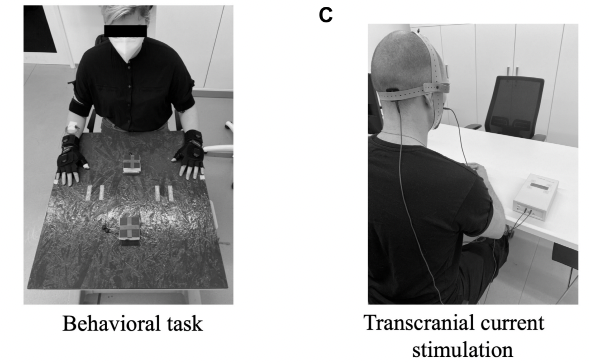
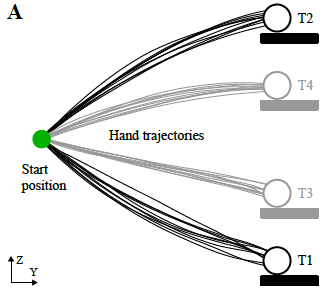
Herzog, Rebecca; Berger, Till M; Pauly, Martje Gesine; Xue, Honghu; Rueckert, Elmar; Munchau, Alexander; B"aumer, Tobias; Weissbach, Anne Cerebellar transcranial current stimulation-an intraindividual comparison of different techniques Journal Article In: Frontiers in Neuroscience, 2022. @article{Herzog2022,
title = {Cerebellar transcranial current stimulation-an intraindividual comparison of different techniques},
author = {Rebecca Herzog and Till M Berger and Martje Gesine Pauly and Honghu Xue and Elmar Rueckert and Alexander Munchau and Tobias B{"a}umer and Anne Weissbach},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/4qoooTyjFfBwYEZ},
doi = {10.3389/fnins.2022.987472},
year = {2022},
date = {2022-09-19},
urldate = {2022-09-19},
journal = {Frontiers in Neuroscience},
keywords = {Human motion analysis, human motor control, machine learning, Medical Robotics},
pubstate = {published},
tppubtype = {article}
}
|  |
2021
|
Denz, R.; Demirci, R.; Cansev, E.; Bliek, A.; Beckerle, P.; Rueckert, E.; Rottmann, N. A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. @inproceedings{Denz2021,
title = {A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning},
author = {R. Denz and R. Demirci and E. Cansev and A. Bliek and P. Beckerle and E. Rueckert and N. Rottmann},
url = {https://cps.unileoben.ac.at/wp/ICAR2021Denz.pdf, Article File},
year = {2021},
date = {2021-12-06},
booktitle = {International Conference on Advanced Robotics },
pages = {7},
keywords = {Grasping, human motor control, Manipulation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Jamsek, Marko; Kunavar, Tjasa; Bobek, Urban; Rueckert, Elmar; Babic, Jan Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Jamsek2021,
title = {Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller},
author = {Marko Jamsek and Tjasa Kunavar and Urban Bobek and Elmar Rueckert and Jan Babic},
url = {../wp/RAL2021Jamsek.pdf, Article File},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {human motor control, movement primitives},
pubstate = {published},
tppubtype = {article}
}
|  |
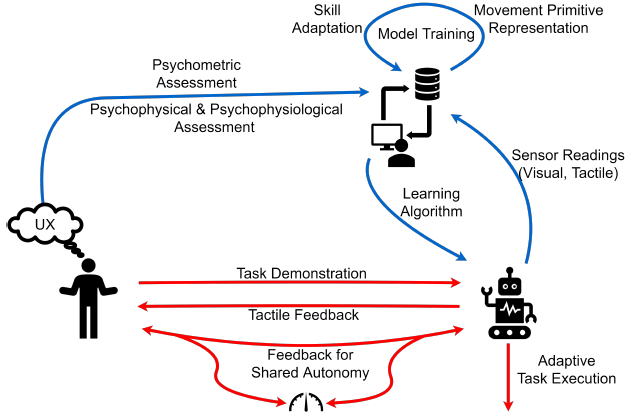
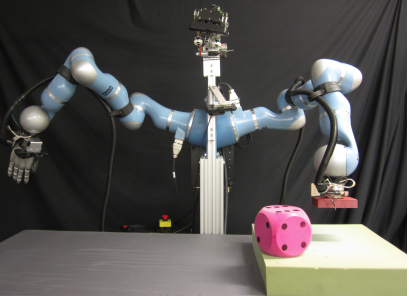
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
pages = {1--28},
keywords = {human motor control, intrinsic motivation, movement primitives, Probabilistic Inference, Reinforcement Learning, spiking},
pubstate = {published},
tppubtype = {article}
}
|  |
2016
|
Azad, Morteza; Ortenzi, Valerio; Lin, Hsiu-Chin; Rueckert, Elmar; Mistry, Michael Model Estimation and Control of Complaint Contact Normal Force Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{Humanoids2016Azad,
title = {Model Estimation and Control of Complaint Contact Normal Force},
author = {Morteza Azad and Valerio Ortenzi and Hsiu-Chin Lin and Elmar Rueckert and Michael Mistry},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Azad.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LocallyWeightedRegression_MEX_2015Rueckert.zip, MATLAB Code (fast LWR MEX-Function Implementation)},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10986},
key = {codyco},
keywords = {constraint optimization, human motor control, inverse dynamics, model learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
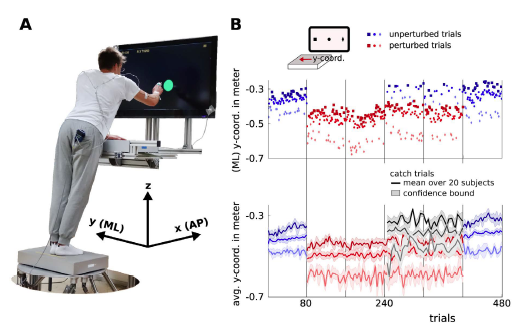
Rueckert, Elmar; Camernik, Jernej; Peters, Jan; Babic, Jan Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control Journal Article In: Nature Publishing Group: Scientific Reports, vol. 6, no. 28455, 2016. @article{Rueckert2016b,
title = {Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control},
author = {Elmar Rueckert and Jernej Camernik and Jan Peters and Jan Babic},
url = {https://cps.unileoben.ac.at/wp/SciReps_HumanContacts.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_ProbabilisticTrajectoryModel_2016Rueckert.zip, MATLAB Code
https://cps.unileoben.ac.at/wp/SciReps_HumanContacts_Supplement.pdf, Supplement},
doi = {10.1038/srep28455},
year = {2016},
date = {2016-06-02},
journal = {Nature Publishing Group: Scientific Reports},
volume = {6},
number = {28455},
keywords = {human motor control, muscle synergies, postural control},
pubstate = {published},
tppubtype = {article}
}
|  |
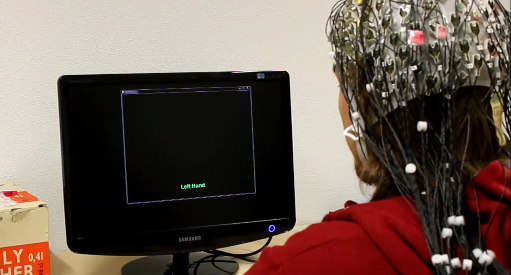
Sharma, David; Tanneberg, Daniel; Grosse-Wentrup, Moritz; Peters, Jan; Rueckert, Elmar Adaptive Training Strategies for BCIs Proceedings Article In: Cybathlon Symposium, 2016. @inproceedings{Sharma2016,
title = {Adaptive Training Strategies for BCIs},
author = {David Sharma and Daniel Tanneberg and Moritz Grosse-Wentrup and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Cybathlon2016Sharma.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Cybathlon Symposium},
crossref = {p10952},
keywords = {human motor control, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

