Meeting 02/02
Research
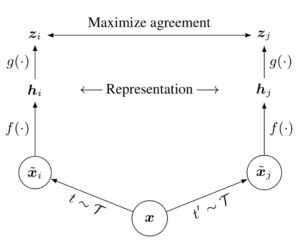
- Follow up CR-VAE
- Files on the papers folder
- Create simple code to run experiments as described on paper
- Upload on gitea
- Create a webpage for CR-VAE paper
- Wait for reviews (March 13)
- Rebuttal (March 19)
- Extend the representation learning work towards disentanglement
- Literature Review
- Dig deeper into Transformers
- Literature Review on SOTA RL algorithms
- Read and implement basic and SOTA RL algorithms
- Can be the base of an RL course too.
- Read and implement basic and SOTA RL algorithms
- Use CR-VAE with SOTA RL algorithms
- First experiments with SAC
- Explore sample efficiency
- Explore gradient flow ablations
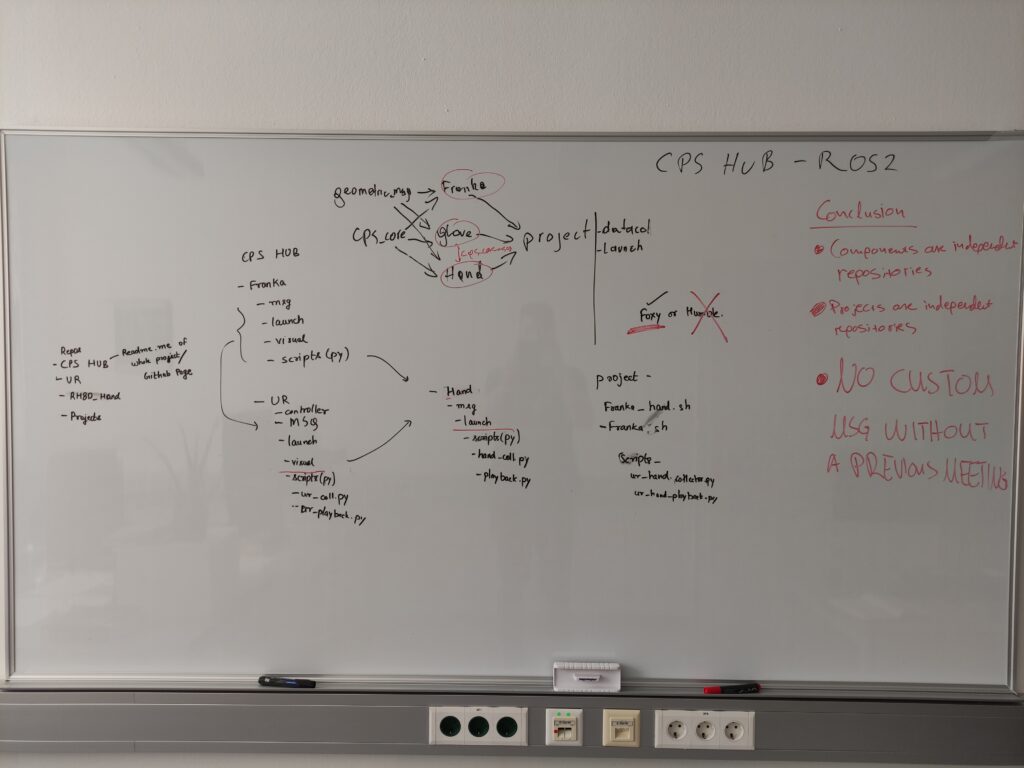
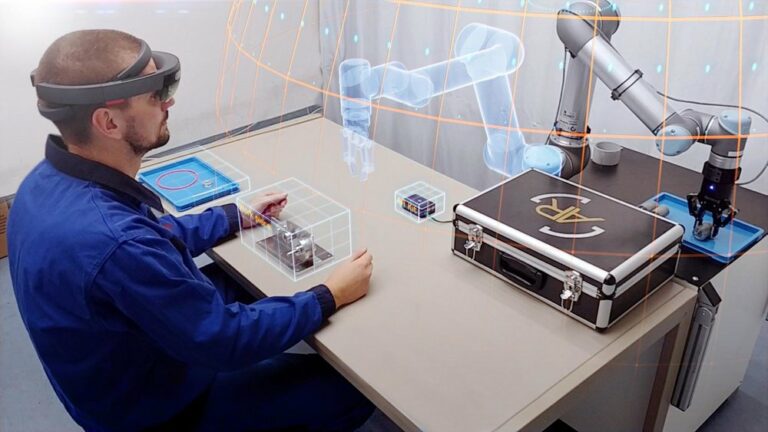
- Develop an AR-ROS2 framework
- Create a minimal working example of manipulating a physical robot (UR3) with Hololens2
M.Sc. Students/Interns
- Melanie
- Thesis Review
- Code submission
- Sign Language project
- Define the project more clearly
- Feedback needed
- Send study details to the applicant
- Define the project more clearly
- AR project
- Is it within the scope of our research?
ML Assistantship
- Syllabus
- Prepare exercises
Miscellaneous
- Ph.D. registration
- Mentor
- Ortner Ronald?
- Other UNI?
- Mentor
- Retreats
- expectations/requirements
- Summer School
- Neural Coffee (ML Reading Group)
- When: Every Friday 10:00-12:00
- Where: CPS Kitchen (?)
- Poster
- Floor and Desk Lamps
Meeting 16/02
Research
- create a new research draft
- implement CURL
- substitute contrastive learning with CR-VAE representations
- Literature review on unsupervised learning (Hinton’s work) to find out ankles that have room for improvement
- write a journal on that
Summer School
- Cv & motivation letter feedback
- Applied
M.Sc. Students/Interns
- Melanie: thesis review done
- Iye Szin:
- Gave her resources to study (ML/NN/ROS2)
- Discussed a plan for internship
Ph.D. registration
- PhD in Computer Science
- Not possible
- probably doesn’t matter(?)
- Call with Dean of Studies
- Mentor
- I would like someone exposed to sample-efficient and robust Reinforcement Learning. Hopefully to Robot Learning too
- Someone that can also extend my scientific network of people
- Can I ask professors from other universities?
- Mentor Candidates
- Marc Toussaint, Learning and Intelligent Systems lab, TU Berlin, Germany
- Abhinav Valada, Robot Learning Lab, University of Freiburg, Germany
- Georgia Chalvatzaki, IAS, TU Darmstadt, Germany
- Edward Johns, Robot Learning Lab, Imperial College London, UK
- Sepp Hochreiter, Institute of Machine Learning, JKU Linz, Austria
- Write a paper with a mentor
ML Course
- Jupyter notebooks or old code? If Jyputer notebooks, why not google collab?
- What will the context of lectures be so that I can prepare exercises accordingly?
- lectures are up
- 20% of the final exam is from the lab exercises
- Decide on the lecture format
- Find an appropriate dataset
Miscellaneous
Science Breakfast @MUL: 14/02 11:00-12:00
Anymal Robot at Mining chair on 15/02?
Effective Communication In Academia Seminar
- Feedback on CPS presentation template:
- Size: Make the slide size the same as PowerPoint (more rectangular).
- Outline (left outline)
- We could skip the subsections. Keep only the higher sections
- Make the fonts darker. They are not easily visible on a projector
- Colors
- Color of boxes (frames) must become darker, otherwise it is not easily distinguishable from the white background on a projector
- Idea: Create a Google Slide template
- Easier to use
- Can add arrows, circles, etc
- Easier with tables
Meeting 28/02
Research
- air-hokey challenge
M.Sc. Students/Interns
- Iye Szin:
- starts 2 March
- Elmar has to sign documents (permanent position)
- Allocation of HW
- transpornder
Ph.D. registration
- Mentor can be from anywhere
- Mentor has to be a recognized scientist (with a “venia docendi” if he/she is from the German-speaking world)
- No courses or ects needed
- the mentor must not be a reviewer of your thesis. He can be an examiner, though.
- Email to Marc Toussaint?
- Officially: no obligations
- Unofficially: propose common reasearch
ML Course
- Google Collab
- Uses the jupyter format.
- Runs online
- Even supports limited access to GPU/TPU
- Speeds up learning process
- Do we need latex?
- yes
- Update slides for the Lab accordingly
- Submission at a folder in the cloud
- ipynb file
- report
- zipped and named : firstname_lastname_m00000_assignment1.zip
- Online lectures -> webex more stable
- Google slides template
- Grading
- 100 pts
- latex report: +10
- optional exercise: +20
- tweetback: 3 questions
Miscellaneous
- IAS retreat
- Melanie’s presentation