Author: Elmar Rueckert




1 PhD Position/4-Year Contract, Dec 15th 2021, RefID: 2111WPH
1 position for a fully employed University Assistant at the Chair of Cyber-Physical-Systems at the earliest possible date or beginning on 1st of January 2022 in a full-time (100%) 4-year term of employment. Salary Group B1 to Uni-KV, monthly minimum charge excl. SZ.: € 2.971,50 for 40 hours per week (14 times a year), actual classification takes place according to accountable activity-specific previous experience.
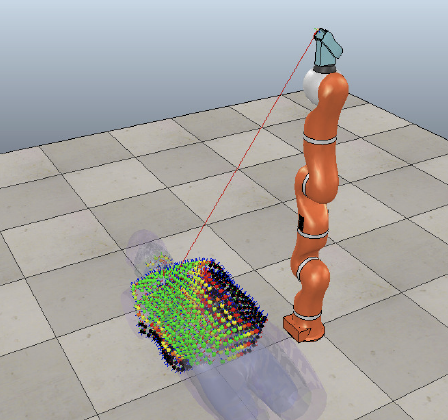
We are looking for a motivated student interested in a PhD thesis on “Robot Learning”. The goal of the doctoral thesis is to develop deep neural networks for interactive learning of autonomous systems and industrial processes. This will involve processing complex sensor data such as from thermal/RGB-D cameras and tactile data for decision making in “greybox” approaches. These hybrid approaches combine the effectiveness of deep neural networks for processing complex data with predictions from analytic dynamic models. The developed models will be tested using realistic industrial applications for process modeling and with robotic systems.
What we offer
The opportunity to work on research ideas of exciting modern topics in artificial intelligence and robotics, to develop your own ideas, to be part of a young and newly formed team, to go on international research trips, and to receive targeted career guidance for a successful scientific career.
Job requirements
Completed master’s degree in computer science, physics, telematics, statistics, mathematics, electrical engineering, mechanics, robotics or an equivalent education in the sense of the desired qualification; Programming experience in one of the languages C, C++, C#, JAVA, Matlab, Python or similar; Willingness and ability for scientific work in research including publications with the possibility to write a dissertation.
Desired additional qualifications
Experience with neural networks, machine learning methods or reinforcement learning. Basic knowledge of Linux or ROS is advantageous. Good English skills and willingness to travel for research and to give technical presentations.
Application
Application deadline: December 15th, 2021
Online Application via: Montanuniversität Leoben Webpage (2111WPH)
The Montanuniversitaet Leoben intends to increase the number of women on its faculty and therefore specifically invites applications by women. Among equally qualified applicants women will receive preferential consideration.