2021
|
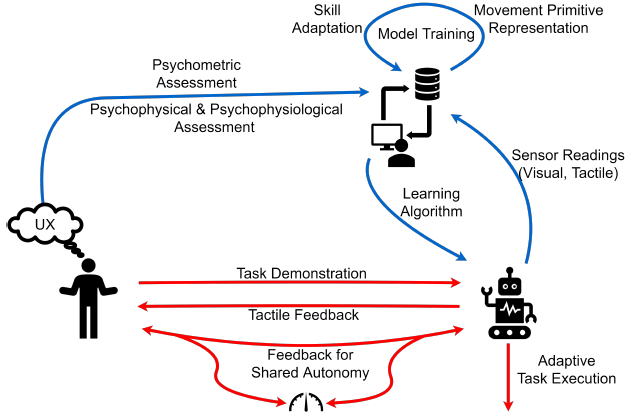
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
pages = {1--28},
keywords = {human motor control, intrinsic motivation, movement primitives, Probabilistic Inference, Reinforcement Learning, spiking},
pubstate = {published},
tppubtype = {article}
}
|  |
2019
|
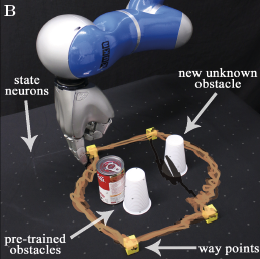
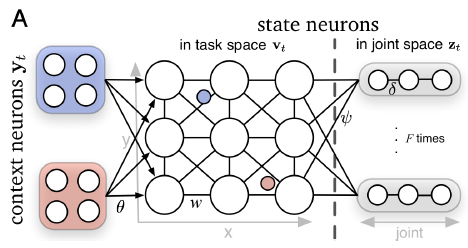
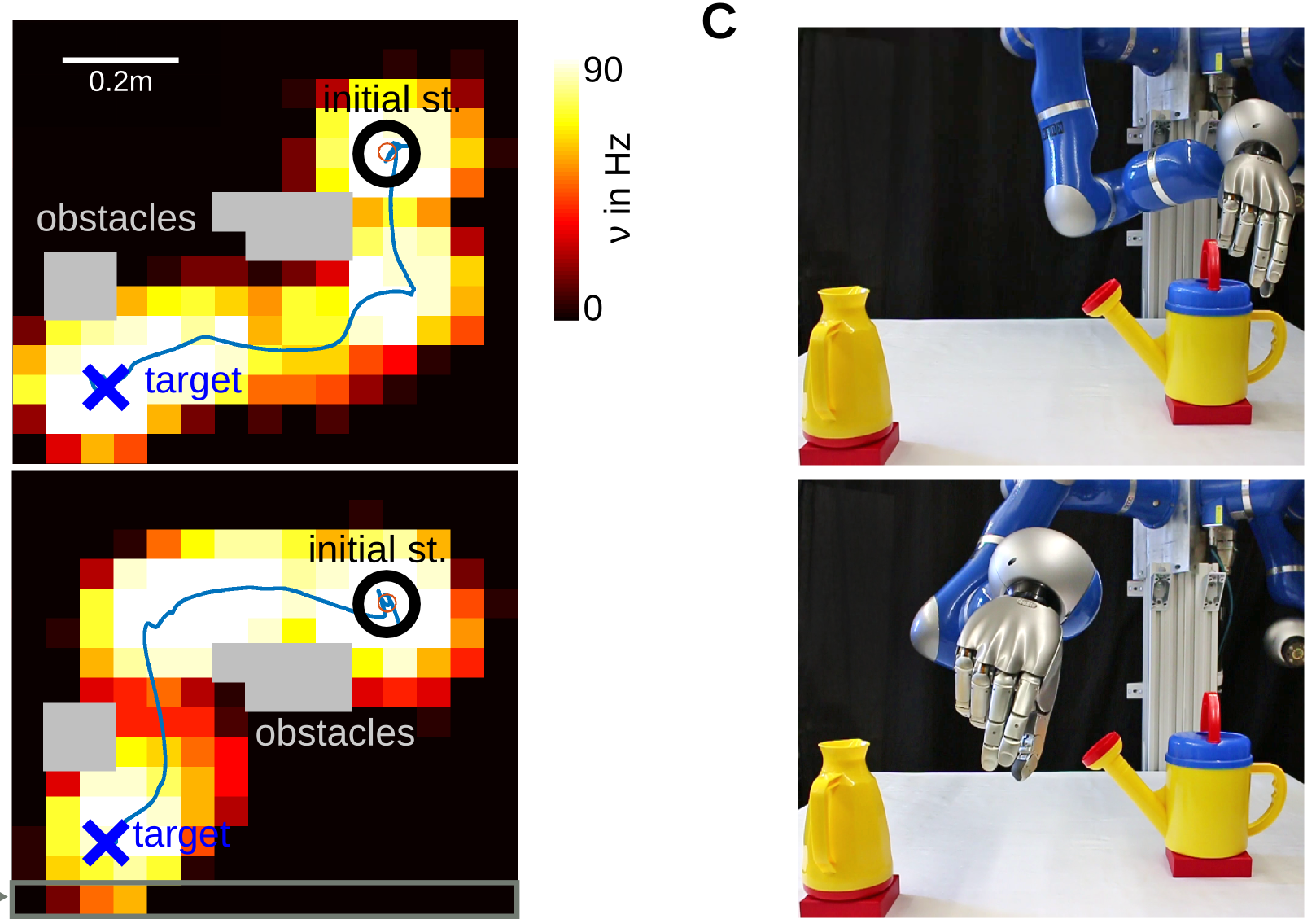
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks Journal Article In: Neural Networks - Elsevier, vol. 109, pp. 67-80, 2019, ISBN: 0893-6080, (Impact Factor of 7.197 (2017)). @article{Tanneberg2019,
title = {Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/NeuralNetworks2018Tanneberg.pdf, Article File},
doi = {10.1016/j.neunet.2018.10.005},
isbn = {0893-6080},
year = {2019},
date = {2019-01-01},
journal = {Neural Networks - Elsevier},
volume = {109},
pages = {67-80},
note = {Impact Factor of 7.197 (2017)},
keywords = {neural network, Probabilistic Inference, RNN, spiking},
pubstate = {published},
tppubtype = {article}
}
|  |
2017
|
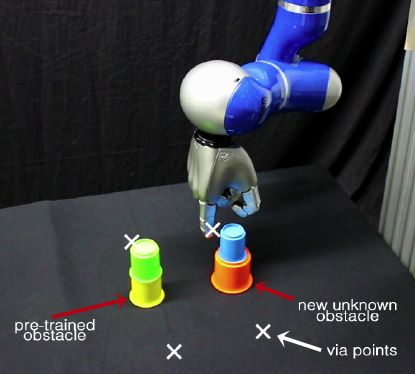
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Efficient Online Adaptation with Stochastic Recurrent Neural Networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Tanneberg2017a,
title = {Efficient Online Adaptation with Stochastic Recurrent Neural Networks},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11092},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
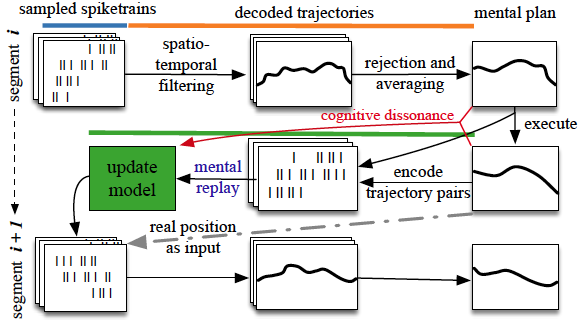
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals Proceedings Article In: Proceedings of the Conference on Robot Learning (CoRL), 2017. @inproceedings{Tanneberg2017,
title = {Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/CoRL2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-10},
booktitle = {Proceedings of the Conference on Robot Learning (CoRL)},
crossref = {p11088},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
Tanneberg, Daniel; Paraschos, Alexandros; Peters, Jan; Rueckert, Elmar Deep Spiking Networks for Model-based Planning in Humanoids Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{tanneberg_humanoids16,
title = {Deep Spiking Networks for Model-based Planning in Humanoids},
author = {Daniel Tanneberg and Alexandros Paraschos and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Tanneberg.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/videos/humanoids_slower_540p.mp4, Supplementary Video},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10980},
key = {codyco and tacman},
keywords = {model learning, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
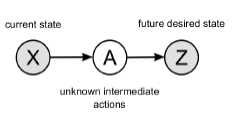
Rueckert, Elmar; Kappel, David; Tanneberg, Daniel; Pecevski, Dejan; Peters, Jan Recurrent Spiking Networks Solve Planning Tasks Journal Article In: Nature Publishing Group: Scientific Reports, vol. 6, no. 21142, 2016. @article{Rueckert2016a,
title = {Recurrent Spiking Networks Solve Planning Tasks},
author = {Elmar Rueckert and David Kappel and Daniel Tanneberg and Dejan Pecevski and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning.pdf, Article File
https://cps.unileoben.ac.at/wp/SciReps_NeuralPlanning_Supplement.pdf, Supplement
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SpikingNeuralPlanning_2016Rueckert.zip, MATLAB Code},
doi = {10.1038/srep21142},
year = {2016},
date = {2016-01-15},
journal = {Nature Publishing Group: Scientific Reports},
volume = {6},
number = {21142},
keywords = {RNN, spiking},
pubstate = {published},
tppubtype = {article}
}
|  |
2014
|
Rueckert, Elmar Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. @phdthesis{Rueckert2014a,
title = {Biologically inspired motor skill learning in robotics through probabilistic inference},
author = {Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/PhDThesis2014Rueckert.pdf, Article File},
year = {2014},
date = {2014-02-04},
school = {Technical University Graz},
keywords = {graphical models, locomotion, model learning, morphological compuation, movement primitives, policy search, postural control, Probabilistic Inference, Reinforcement Learning, RNN, SOC, spiking},
pubstate = {published},
tppubtype = {phdthesis}
}
|  |