2025
|
Dave, Vedant; Rueckert, Elmar Skill Disentanglement in Reproducing Kernel Hilbert Space Proceedings Article In: Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), pp. 16153-16162, 2025. @inproceedings{Dave2025bb,
title = {Skill Disentanglement in Reproducing Kernel Hilbert Space},
author = {Vedant Dave and Elmar Rueckert
},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/m9XKo4t2FXAH6Cs},
doi = {https://doi.org/10.1609/aaai.v39i15.33774},
year = {2025},
date = {2025-04-11},
urldate = {2025-02-27},
booktitle = {Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)},
volume = {39},
number = {15},
pages = {16153-16162},
abstract = {Unsupervised Skill Discovery aims at learning diverse skills without any extrinsic rewards and leverage them as prior for learning a variety of downstream tasks. Existing approaches to unsupervised reinforcement learning typically involve discovering skills through empowerment-driven techniques or by maximizing entropy to encourage exploration. However, this mutual information objective often results in either static skills that discourage exploration or maximise coverage at the expense of non-discriminable skills. Instead of focusing only on maximizing bounds on f-divergence, we combine it with Integral Probability Metrics to maximize the distance between distributions to promote behavioural diversity and enforce disentanglement. Our method, Hilbert Unsupervised Skill Discovery (HUSD), provides an additional objective that seeks to obtain exploration and separability of state-skill pairs by maximizing the Maximum Mean Discrepancy between the joint distribution of skills and states and the product of their marginals in Reproducing Kernel Hilbert Space. Our results on Unsupervised RL Benchmark show that HUSD outperforms previous exploration algorithms on state-based tasks.},
keywords = {Deep Learning, neural network, Reinforcement Learning, Skill Discovery, Unsupervised Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Unsupervised Skill Discovery aims at learning diverse skills without any extrinsic rewards and leverage them as prior for learning a variety of downstream tasks. Existing approaches to unsupervised reinforcement learning typically involve discovering skills through empowerment-driven techniques or by maximizing entropy to encourage exploration. However, this mutual information objective often results in either static skills that discourage exploration or maximise coverage at the expense of non-discriminable skills. Instead of focusing only on maximizing bounds on f-divergence, we combine it with Integral Probability Metrics to maximize the distance between distributions to promote behavioural diversity and enforce disentanglement. Our method, Hilbert Unsupervised Skill Discovery (HUSD), provides an additional objective that seeks to obtain exploration and separability of state-skill pairs by maximizing the Maximum Mean Discrepancy between the joint distribution of skills and states and the product of their marginals in Reproducing Kernel Hilbert Space. Our results on Unsupervised RL Benchmark show that HUSD outperforms previous exploration algorithms on state-based tasks. |  |
2024
|
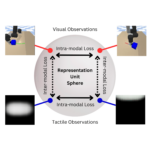
Lygerakis, Fotios; Dave, Vedant; Rueckert, Elmar M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Lygerakis2024,
title = {M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation},
author = {Fotios Lygerakis and Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/NPejb2Fp4Y8LeyZ},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Contrastive Learning, Manipulation, Multimodal Reinforcement Learning, Multimodal Representation Learning, Reinforcement Learning, Robot Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
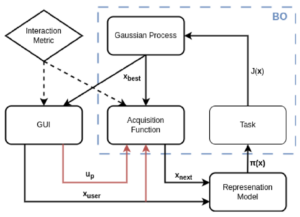
Feith, Nikolaus; Rueckert, Elmar Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Feith2024A,
title = {Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement},
author = {Nikolaus Feith and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/6rTWAkoXa3zsJxf},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Interactive Learning, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2023
|
Yadav, Harsh; Xue, Honghu; Rudall, Yan; Bakr, Mohamed; Hein, Benedikt; Rueckert, Elmar; Nguyen, Ngoc Thinh Deep Reinforcement Learning for Mapless Navigation of Autonomous Mobile Robot Proceedings Article In: International Conference on System Theory, Control and Computing (ICSTCC), 2023, (October 11-13, 2023, Timisoara, Romania.). @inproceedings{Yadav2023b,
title = {Deep Reinforcement Learning for Mapless Navigation of Autonomous Mobile Robot},
author = {Harsh Yadav and Honghu Xue and Yan Rudall and Mohamed Bakr and Benedikt Hein and Elmar Rueckert and Ngoc Thinh Nguyen},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/zEnY3yoFHZRdzkR},
year = {2023},
date = {2023-06-26},
urldate = {2023-06-26},
publisher = { International Conference on System Theory, Control and Computing (ICSTCC)},
note = {October 11-13, 2023, Timisoara, Romania.},
keywords = {Autonomous Navigation, Deep Learning, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
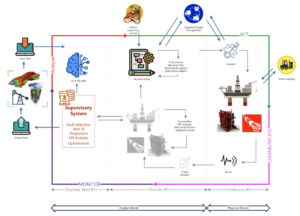
Keshavarz, Sahar; Vita, Petr; Rueckert, Elmar; Ortner, Ronald; Thonhauser, Gerhard A Reinforcement Learning Approach for Real-Time Autonomous Decision-Making in Well Construction Proceedings Article In: Society of Petroleum Engineers – SPE Symposium: Leveraging Artificial Intelligence to Shape the Future of the Energy Industry, AIS 2023, Society of Petroleum Engineers., 2023, ISBN: 9781613999882. @inproceedings{Keshavarz2023,
title = {A Reinforcement Learning Approach for Real-Time Autonomous Decision-Making in Well Construction},
author = {Sahar Keshavarz and Petr Vita and Elmar Rueckert and Ronald Ortner and Gerhard Thonhauser},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/yT9Erwsnk36JKtr},
doi = {10.2118/214465-MS},
isbn = {9781613999882},
year = {2023},
date = {2023-01-19},
urldate = {2023-01-19},
booktitle = {Society of Petroleum Engineers - SPE Symposium: Leveraging Artificial Intelligence to Shape the Future of the Energy Industry, AIS 2023},
publisher = {Society of Petroleum Engineers.},
keywords = {Reinforcement Learning, Well Construction},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2020
|
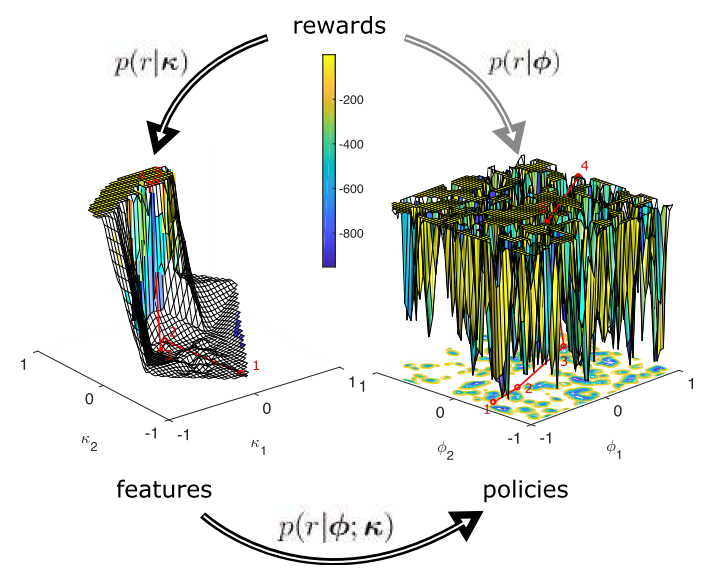
Rottmann, N.; Kunavar, T.; Babič, J.; Peters, J.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS’ 2020), 2020. @inproceedings{Rottmann2020HiBO,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and T. Kunavar and J. Babič and J. Peters and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {International Conference on Intelligent Robots and Systems (IROS’ 2020)},
keywords = {Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
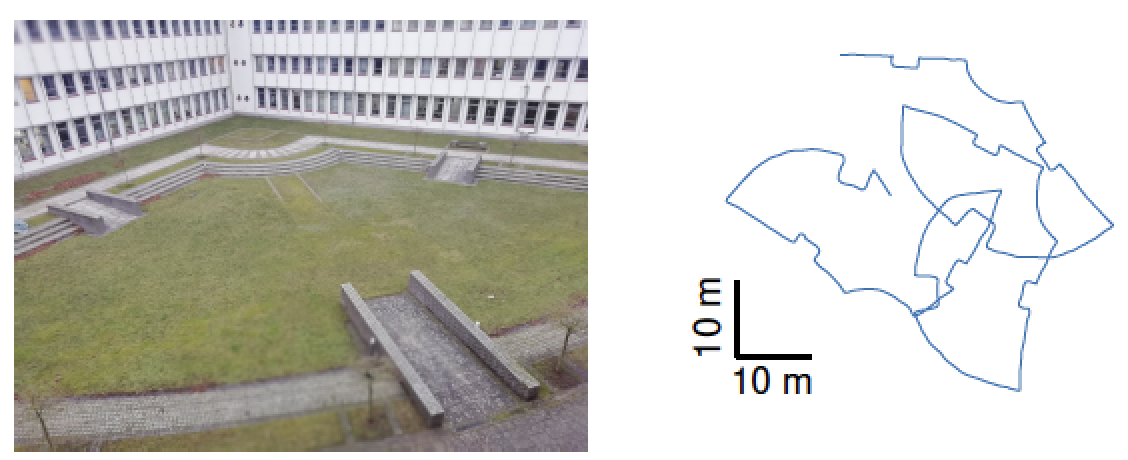
Rottmann, N.; Bruder, R.; Xue, H.; Schweikard, A.; Rueckert, E. Parameter Optimization for Loop Closure Detection in Closed Environments Proceedings Article In: Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS), pp. 1–8, 2020. @inproceedings{Rottmann2020c,
title = {Parameter Optimization for Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and H. Xue and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROSWS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS)},
pages = {1--8},
keywords = {mobile navigation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
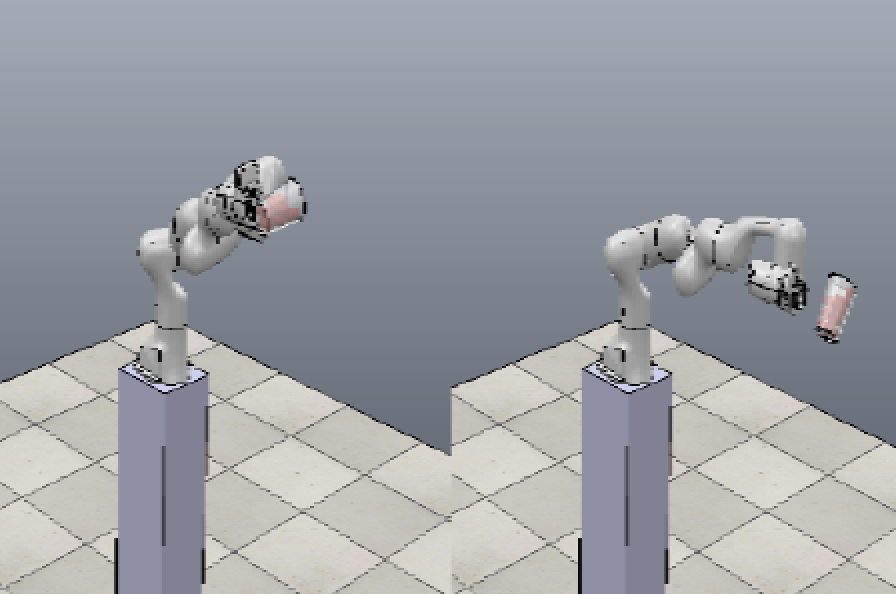
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {Manipulation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2019
|
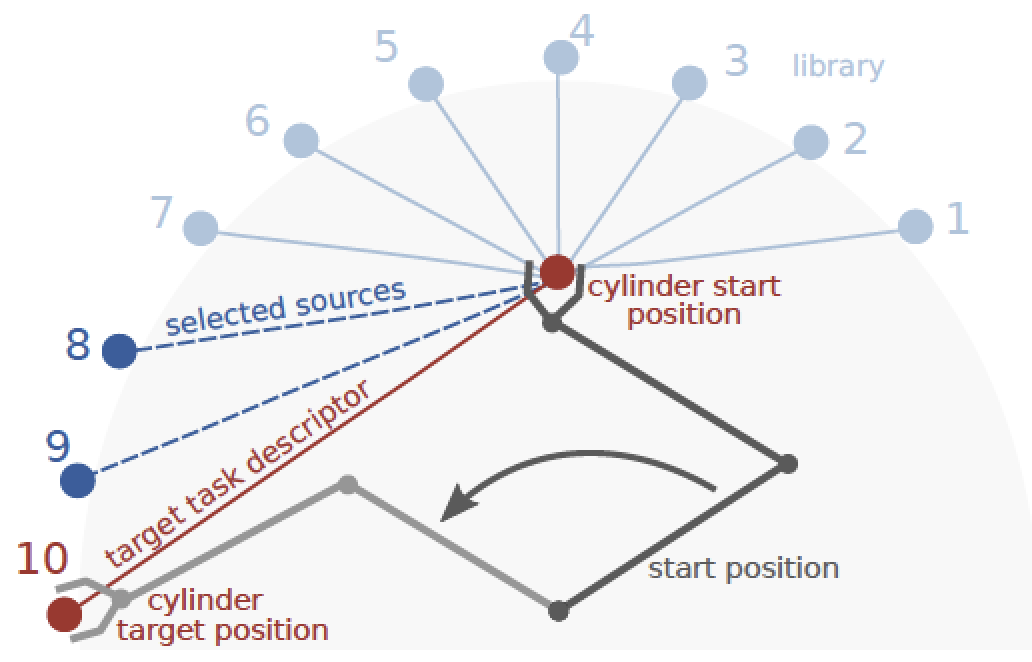
Stark, Svenja; Peters, Jan; Rueckert, Elmar Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. @inproceedings{Stark2019,
title = {Experience Reuse with Probabilistic Movement Primitives},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2019Stark.pdf, Article File},
year = {2019},
date = {2019-11-03},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019.},
keywords = {movement primitives, Reinforcement Learning, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
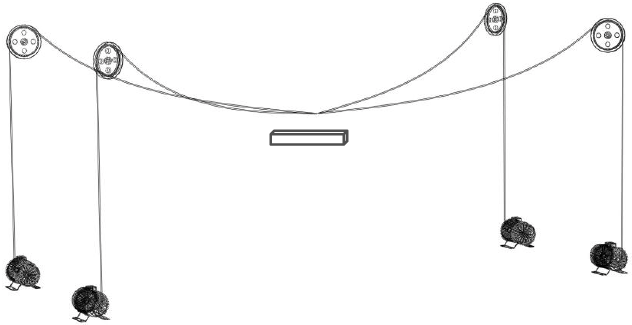
Rueckert, Elmar; Jauer, Philipp; Derksen, Alexander; Schweikard, Achim Dynamic Control Strategies for Cable-Driven Master Slave Robots Proceedings Article In: Keck, Tobias (Ed.): Proceedings on Minimally Invasive Surgery, Luebeck, Germany, 2019, (January 24-25, 2019). @inproceedings{Rueckert2019c,
title = {Dynamic Control Strategies for Cable-Driven Master Slave Robots},
author = {Elmar Rueckert and Philipp Jauer and Alexander Derksen and Achim Schweikard},
editor = {Tobias Keck},
doi = {10.18416/MIC.2019.1901007},
year = {2019},
date = {2019-01-24},
booktitle = {Proceedings on Minimally Invasive Surgery, Luebeck, Germany},
note = {January 24-25, 2019},
keywords = {Medical Robotics, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
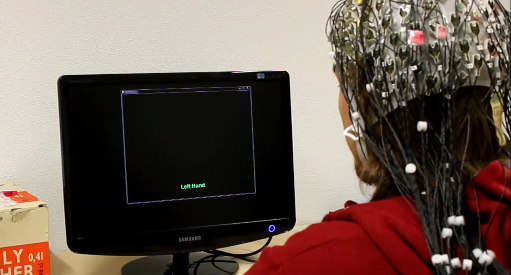
Sharma, David; Tanneberg, Daniel; Grosse-Wentrup, Moritz; Peters, Jan; Rueckert, Elmar Adaptive Training Strategies for BCIs Proceedings Article In: Cybathlon Symposium, 2016. @inproceedings{Sharma2016,
title = {Adaptive Training Strategies for BCIs},
author = {David Sharma and Daniel Tanneberg and Moritz Grosse-Wentrup and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Cybathlon2016Sharma.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Cybathlon Symposium},
crossref = {p10952},
keywords = {human motor control, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2013
|
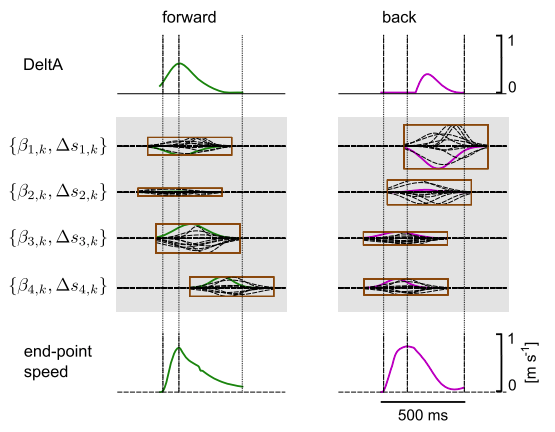
Rueckert, Elmar; d’Avella, Andrea Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems Proceedings Article In: Abstracts of Neural Control of Movement Conference (NCM), Conference Talk, pp. 27–28, 2013. @inproceedings{Rueckert2013,
title = {Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems},
author = {Elmar Rueckert and Andrea d'Avella},
url = {https://cps.unileoben.ac.at/wp/Frontiers2013bRueckert.pdf, Article File},
year = {2013},
date = {2013-01-01},
booktitle = {Abstracts of Neural Control of Movement Conference (NCM), Conference Talk},
pages = {27--28},
crossref = {p10682},
keywords = {muscle synergies, policy search, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

